Wire Bonding, Flip Chip Bonding, Microbump
Wire Bonding: 用金属引线将芯片和PCB连接起来

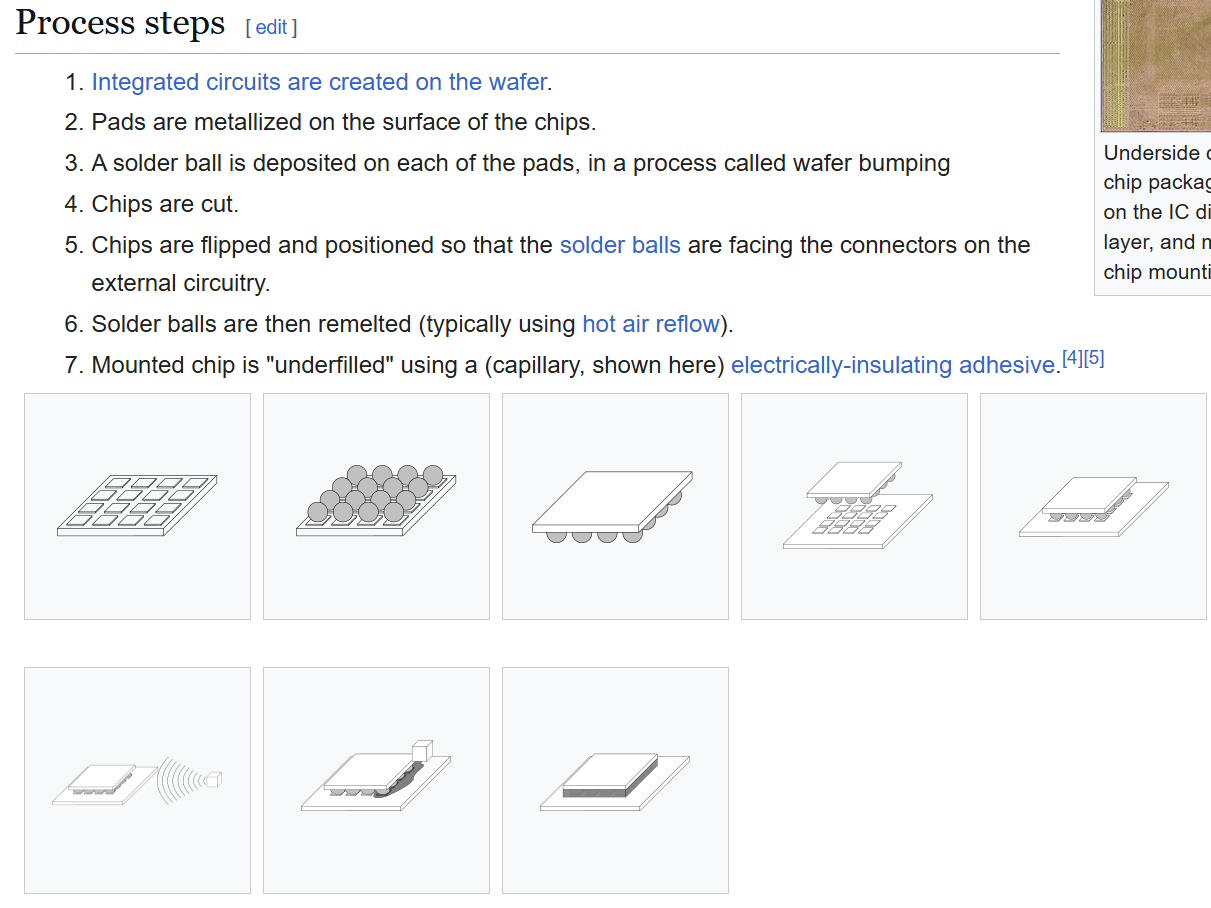
Flip Chip Bonding(覆晶键合): 在芯片上连接焊锡凸块(Solder Bump)(Micro-bump),然后将芯片翻转过来使凸块和衬底(substrate)直接连结。
Wire-Bonding-Based 3D IC VS. TSV-Based 3D IC VS. 2D IC

如上图为wire-bonding-based 3D IC
以下为Deepseek的回答:
Key Advantages of Wire-Bonded 3D ICs Over 2D ICs:
- Reduced Horizontal Interconnect Length:
- By vertically stacking dies, wire-bonded 3D ICs reduce the need for long horizontal interconnects within individual layers. This can lower resistive-capacitive (RC) delays and power consumption compared to 2D layouts, especially in designs with critical paths that benefit from shorter intra-layer routing.
- Footprint and Integration Density:
- Stacking dies allows for higher functional density in the same or smaller footprint, enabling compact designs for space-constrained applications (e.g., mobile devices). This can indirectly enhance performance by enabling heterogeneous integration (e.g., combining logic, memory, and sensors).
- Memory Access Optimization:
- Stacking memory on a processor die using wire bonding (e.g., in multi-chip modules) can reduce latency and power consumption compared to off-chip 2D PCB-based interconnects, though not as effectively as TSVs. This is critical for memory-intensive applications.
- Thermal and Manufacturing Considerations:
- Wire-bonded stacks may have better thermal dissipation than TSV-based stacks due to potential air gaps or less dense packaging, though this is design-dependent. Additionally, wire bonding is a mature, low-cost technology, improving yield and reducing manufacturing complexity compared to TSVs.
Limitations Compared to TSV-Based 3D ICs:
- Interconnect Parasitics: Wire bonds introduce higher resistance, inductance, and capacitance than TSVs, limiting bandwidth and increasing signal delay for high-speed applications.
- Lower Vertical Interconnect Density: Wire bonds cannot match the thousands of connections enabled by TSVs, creating bottlenecks for applications requiring dense vertical communication (e.g., high-bandwidth memory interfaces).
- Design Constraints: Performance gains depend on minimizing inter-layer communication, as wire bonds are less efficient for frequent vertical data transfer.
When Wire-Bonded 3D ICs Outperform 2D ICs:
- Moderate Vertical Communication Needs: Applications with limited inter-layer signaling (e.g., partitioned functional blocks) benefit from reduced horizontal routing without significant vertical overhead.
- Cost-Sensitive Applications: Where TSV manufacturing costs are prohibitive, wire bonding offers a cost-effective way to achieve partial 3D benefits.
- Heterogeneous Integration: Combining disparate technologies (e.g., analog/RF with digital logic) in a compact form factor, leveraging tested known-good dies for improved yield.
Conclusion:
Wire-bonded 3D ICs can outperform 2D ICs in scenarios where reduced horizontal interconnect length and compact integration outweigh the limitations of wire bonds. However, for high-performance applications requiring dense vertical interconnects (e.g., AI accelerators, advanced memory stacks), TSV-based 3D ICs remain superior. The choice depends on balancing performance requirements, cost, and design complexity.
3D Interconnect Architectures for Heterogeneous Technologies书籍阅读笔记
总览
PART 1 Introduction
Chapter 1 Introduction to 3D Technologies
Motivation for 3D Integration
Motivation 1: 相同的总silicon area下,3D比2D线长更短

上图中,footprint应该指占用的面积。Silicon area是总的面积。Longest wire长度指的是Manhattan Routing(线只能在正交的两个方向上走)条件下的最长线长(长+宽)
这个Motivation需要在3D互联的成本足够低的时候才能成立。
Motivation 2:不同工艺、不同功能的异构集成

memory不用兼容logic cell的工艺,反之亦然
在SoC中,很多模拟组分不需要很先进的工艺,而数字组分往往需要很先进的工艺,3D技术允许二者的结合,从而降低成本
3D Integration应用举例
很多,page 29
3D Integration的两种方式
方式一:(Monolithic / Sequential Integration) 在一个substrate上先build layer0,再在layer0上build layer1,再在layer1上build layer2,依此类推。即不同Layer的build是sequential的
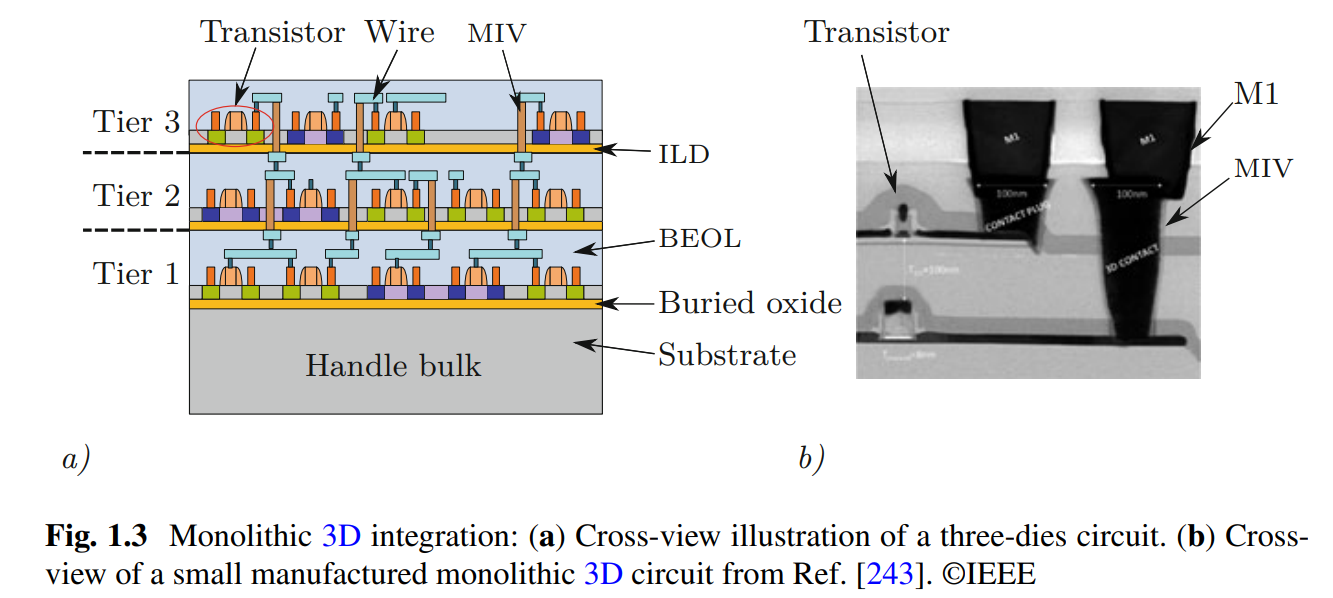
制造过程:衬底和Tier 1的制造工艺和制造2D IC没有区别。制造完Tier 1之后,在上面加一层Inter-layer dielectric (ILD,即一层氧化绝缘层),接着把Tier 2的厚厚的substrate直接键合(direct-bonding)到这层ILD上,然后通过湿刻蚀减薄这层substrate。紧跟着制造Tier 2的active circuit(即晶体管)。晶体管制造完之后,制造金属层用来互连。制造完金属层后,通过Bosch工艺刻蚀并填充出Tier 2和Tier 1之间的连接(成为monolithic inter-tier vias, MIV)。如果需要制造Tier 3,就重复上述过程(先加氧化层,再键合substrate,再刻蚀减薄,…)
优势:因为是一层一层叠上去的,layer之间的connection可以更dense(这些MIV可以很小,很密集),互联速度更高,虽然相应的复杂度也会更高
PRO: monolithic integration带来的架构上的机会:系统分割(system partitioning)
晶体管级:可以把NMOS和PMOS分开放在不同的Tier上,从而允许精细调节二者的工艺参数,达成更好的性能。缺点是需要加很多MIV,而MIV产率不是很高。
门级:可以把设计按门划分,把一些特定的门的组合放在一个Tier上,把另一些门的组合放在另一个Tier上,从而实现面积(footprint)的减小。(把全部门放在一个Tier上会导致有些地方的面积不得不浪费)。缺点是需要加很多MIV,而MIV产率不是很高。
block级/core级:比如存储单元放一个Tier,digital单元放一个Tier,analog单元放一个Tier,Mixed-Signal单元放一个Tier。最常见,本书关注。

晶体管级partitioning和门级partitioning很可能达不到应有的好处,如上图,左边是普通的2D-IC metal stack,最底下是Active Layer (晶体管逻辑),往上是五层local wires (M1-M5),五层intermediate wires (M6-M10),两层global wires (M11-M12)。如果用晶体管级partitioning,如中间的图(TR-M3D),bottom tier一般没有较粗的intermediate/global wires,因为这些太粗的线会严重影响MIV的minimum pitch,导致密度急剧下降。同理,对于门级partitioning,如右边的图(G-M3D),一般没有global wires。然而,缺乏这些较粗的wire会严重影响传输速度(细线的电阻很大),从而抑制传输的最高频率,这个drawback会vanish掉晶体管级/门级partitioning的好处。
CON: monolithic integration带来的intrinsic heterogeneity (top-tier和bottom-tier的performance差异)
top-tier制造过程中必须使用较低的温度来退火修复缺陷,否则已经制造好的bottom-tier的transistor产率就会下降。然而退火温度太低会导致top-tier的缺陷没有被很好地修复,top-tier transistor的performance下降约20%。如果使用正常需要的温度来退火修复top-tier缺陷,bottom-tier就必须使用对温度不敏感的钨(tungsten)互连,但这又导致bottom-tier的互联电阻增大,每单位长度增加额外的10%-30%传播延时(propagation delay)。
这一点必须纳入架构模型的考虑。否则可能导致实际比预期高出50%的EDP(energy-delay-product)。
CON: 处在中间的Tier的Active Layer会被其上和其下的metal干扰,从而导致可靠性下降,产率下降。
因为处在中间的Tier的Substrate一般很薄,上面和下面的金属线可能带来很大的耦合噪声(coupling noise),特别对于模拟电路来说,不可接受。
方式二:(TSV-based / Parallel Integration) 分开build不同的layer,最后再通过TSV stack起来。
工艺相对比较成熟,产率更高
因为不同的layer是分开做的,对齐更难,layer之间的connection密度更低,layer之间的communication速度受限
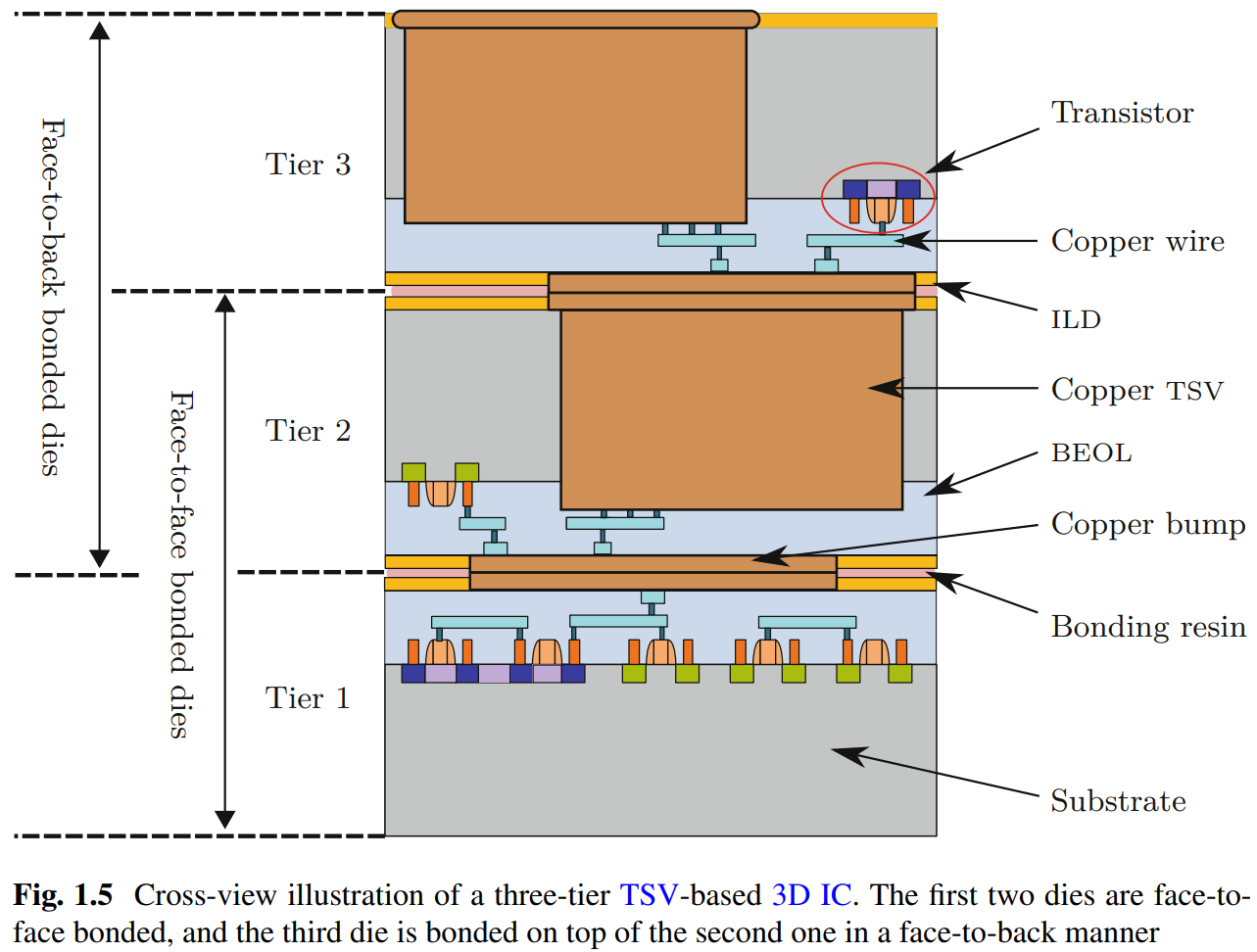
如上图,最底的两个Tier(Tier1 and Tier2)不需要用TSV连接,直接面对面把最顶层金属贴一起就可以(只需要bonding bump)。从Tier3和Tier2的连接开始,需要用TSV,方法是Tier3的face对着Tier2的substrate,中间打一个TSV穿过整个Tier2的substrate,由于TSV占用了Tier2 substrate的一部分,这部分不能用来做active circuit,所以TSV会增大对substrate面积的需求
TSV的三种制造方法
方法1: Via-First:TSV在active-circuit(FEOL)和metal layers(BEOL)之前被制造。优势是这样造出来的TSV最短最小,缺点是后续的高温会损坏已经做好的TSV,如果把铜换成更耐高温的其他材料又会导致和标准的BEOL工艺不兼容。
方法2:via-last:TSV在FEOL和BEOL之后被制造。优点是这样造出来的TSV只需要能承受后续键合(bonding)和硅片减薄(wafer thinning)即可。缺点是这样做出来的TSV最长,而且做TSV所需的刻蚀需要刻蚀掉很多层(substrate+several metal&dielectric layers)。另外,这样制造的TSV的thermal budget(制造TSV时允许的最高温度)较低,因为不能破坏已经做好的metal layers。
方法3: Via-Middle:主流方法。TSV在FEOL之后、BEOL之前被制造。具体流程如下图。(图中的TSV liner就是一层绝缘氧化层(通过Bosch工艺引入))

四种主要的TSV制造缺陷:
空隙(voids):由Improper TSV filling or stress during bonding引起
表面分层(delamination at the interface):由TSV和其对应bumper的空间错位引起
材料不纯(material impurities):会削弱TSV通道的电导率
TSV与substrate之间短路(TSV-to-substrate shorts):TSV和substrate之间的绝缘氧化层(TSV liner)有洞
TSV制造缺陷带来的TSV分布上的考量:
TSV之间应该尽可能分布得sparsely
应该尽量减小TSV数量,只用TSV来connect large circuit blocks
应该尽量使TSV分布规律,以便复制工艺
应该在TSV clustering到一起时适当引入redundancy。
TSV面积与NAND cell和Full Adder Cell的对比

除此之外,由于TSV 的copper filling时会对周边的active circuit造成很大的热应力,一般会在TSV四周留出大致相当于TSV直径的KOZ(keep-out zone),这个区域也会被浪费掉,不会用来制造active circuit。
总结而言,TSV制造过程中的挑战归结到TSV-based 3D integration上就是两点。一是如何提高TSV产率,二是如何降低TSV对面积的要求。
TSV寄生电容与NAND Cell输入电容的对比

在书中给的模型里,由于TSV的寄生电容远远大于NAND Cell的输入电容,假如需要翻转TSV的逻辑值,22nm下需要122×,122×的比NAND Cell更大的电流。
TSV寄生电容比Full-Adder Cell的输入电容大20倍

半径1μm的小TSV的寄生电容可以和192μm长度的global metal wire相比拟
半径1μm的小TSV的寄生电容可以和243μm长度的local/intermediate metal wire相比拟
减小TSV半径不能很好地减小TSV寄生电容,减小2倍半径只可带来小于7%的TSV电容减小。
有效减小TSV半径的唯一办法是减薄substrate的厚度,从而减小TSV的长度,然而如前所述这会导致可靠性的大幅度下降。
总之,TSV由于其巨大的寄生电容,在比特翻转时需要消耗大量的能量,是对整个3D芯片power consumption的重大威胁。
由于TSV半径很大,电阻极小(~Ω),远小于金属线电阻(~kΩ),因此总体而言,TSV的存在仍然使3D集成的通信速度要高于传统2D。
Chapter 2 Interconnect Architectures for 3D Technologies
NoC和其他互联架构的最重要区别(route packets, not wire)
NoC基于packet进行数据传输
其他互联架构基于wire进行数据传输(direct links, crossbars, buses)
NoC的组分
Processing Elements (PE):通过Network Interface连接到NoC。每个PE代表SoC的一个component。
Network Interface (NI):一般承担serialization/deserialization的工作
Router: 负责在NoC中路由并传输数据。

注意:同一位置的1个PE+1个NI+1个Router合在一起叫做一个Tile.
NoC的几种常见的switching方法
Store-and-Forward Switching: packet-based。packet被完全存储在router中,然后被发送出去。只有当整个packet被完全存储在router之后,才允许发送,边存边发是不被允许的。这种方法需要很大的buffer space,速度也很慢,现在很少用。
virtual cut-through switching:相比于store-and-forward switching,该方法只需要通过packet header读出packet的尺寸,并确认目标node有足够的空间可以存下整个packet,就可以在目标node分配一块足以存下整个packet的空间,并开始发送packet(此时packet可以还没有完成存储),可以理解为边存边发。此方法需要的buffer space比store-and-forward switching更小,但比wormhole switching更大。在没有发生Blocking时,latency和wormhole switching一致;在发生blocking时,通常只会影响当前node,网络整体latency比wormhole switching更小。
wormhole switching:最常用的switching方法。packet被划分为很多flit(flow control units)。只要目标node有一个flit的空间,flit就可以立即forward。这种方法的好处是可以在每个router node维护很小的buffer space(如1-2个flit),缺点是一旦发生blocking,容易同时堵塞很多个node (由于同一个flit往往分布在很多个node上,并且在packet没有完成传输之前这条path需要reserve)(这个缺点可以被虚拟通道补偿掉,因为虚拟通道可以大大减少blocking)
除上述方法之外,常见的还可以进行circuit switching(典型应用如QoS)。可以为了优先级,建立一条从source到destination的path(virtual circuit),在优先级撤掉之前,数据可以不经路由地在这条virtual circuit上高速通行,保证极高的throughput
NoC Router的基本结构

Switch Arbiter根据head flit中的destination信息和output unit的状态和虚拟通道(VC)的分配情况对crossbar进行配置。
NoC Router的两种Flow Control方法
valid-ready
credit-based
credit的方法更常用。主要是不需要等receiver回ready回来,时序和速度相对更好。当然面积开销稍有上升。
NoC的网络拓扑(Network Topology)
网络直径(Network diameter):”网络中任何两个节点之间的最短距离“的最大值(距离用跳(hop)来计算)
平均距离(Average Distance):”网络中任何两个节点之间的最短距离“的平均值
节点度数(Node degree):router节点的port数目(可达多少个其他的Node)。port数量越小,router面积越小,但网络性能越差。port数量过大,布局布线会有困难。
对剖宽度(Bisection Width):使网络对剖 所需移去的最少edge数。该数值越大,网络对link failure更鲁棒。

Mesh网络:假设是m*n的Mesh网络,则网络直径m+n-2,平均距离(m+n)/3,节点度数介于2~4,对剖宽度min(n,m),link数量2(m(n-1)+n(m-1))
Torus网络:在mesh网络的基础上把最外面的对应node连起来。该拓扑减小了平均距离,缺点是线长会过长,而且首尾相连很难做layout
Tree网络:routing algorithm很简单,只需要Move up / Move down。
Small-world网络:优点是网络直径很小
NoC路由算法(Routing Algorithm)的分类
分类1:transmission开始前,从source到destination的path是否已知。如已知,为source routing;如未知,为distributed routing
分类2:如何计算出下个节点?法1:使用查找表存储。面积开销很大。法2:使用routing function实时计算。
分类3:是否路由到最短路径?分为minimal和non-minimal
分类4:根据routing function所需的输入分类。如只需输入source,也就是上述的source/deterministic routing;还可以是oblivious routing(健忘的),也就是在可用的几种路径中每次随机挑选一个;还可以是adaptive routing,也就是根据网络的congestion, high link loads, faulty links等等实时切换,发论文最好水的方向。
经典的路由算法:Turn-based models(基于转向的路由模型)
通过限制某些转向,达成防止死锁的目的。
比如经典的X-Y routing等等
活锁(Livelock)
packet不停在网络中转转转但是永远到不了终点。
如果网络采用minimal path routing,不会有活锁的情况产生(因为每一步都在拉近和终点的距离)
如果网络采用non-minimal path routing,可能出现活锁。可以通过拓扑上数学证明或者在每个node上增设一个counter的方法检测活锁(counter统计同一个packet经过node的次数,一旦超过某个阈值,这个packet就会被单拎出来处理)
NoC的评价指标
Performance: its capability to transmit data
Packet Latency:Packet从source到destination所需的时间的平均
Throughput:定义为the number of packets $n_{packets}$ that are accepted per period of time $\Delta t$.即\(Throughput=\frac{n_{packets}}{\Delta t}\)。常见的比如packets/flits per cycle or per second。如果叠加上带宽的信息和包的大小,可以转化成Mb/s
形式化、不面向特定应用的Traffic Patterns(通用,但是对实际应用的modeling有限)

Uniform random:随机指定每个起点node所对应的终点node
Hotspot:所有起点node全部指向同一个终点node。用来模拟节点的最高压情形。
Transpose:所有起点node被路由到矩阵transpose后的位置。该pattern对vertical和horizontal links的压力较大
Bit Complement:所有起点node被路由到对称位置。该pattern对vertical和horizontal links的压力较大,激活的link比Transpose pattern更全面。
Bit Reversal:所有起点node被路由到比特反转位置。如3‘b100–>3’b001
Task-Graph-Based Traffic Patterns (介于真实pattern和形式化pattern之间,不需要跑系统仿真器(比如gem5))
Real-World-Based Traffic Patterns (最精确,最慢)
其他评价指标:Area, Power, Timing
Popular NoC Simulators: BookSim 2.0, Noxim
3D IC中Interconnect Architecture的Overview
点对点连接?NoC?vertical shared bus? (一般需要一个central arbiter and decoder,但3D stacking很难实现这一点)
3D NoC Overview(有很多有趣的论文,以后可以看看)
一些在2D NoC中生命力较弱的拓扑重新焕发生机。比如Torus(2D中线长较长,3D的短线长使之不再成为问题)
划分为三类

Homogeneous 3D NoC:上下同构,2D加了一个维度。跟2D的主要区别在于router的port数量上升,虽然这会带来更达的area, power和更差的timing,但3D NoC更多的path和更小的Network diameter补偿了这一点。
Heterogeneous 3D NoC:上下不同构
Hybrid 3D NoC:部分router之间用vertical bus连接。减少了部分router的port数量,packet可以cross more than one die in one step。
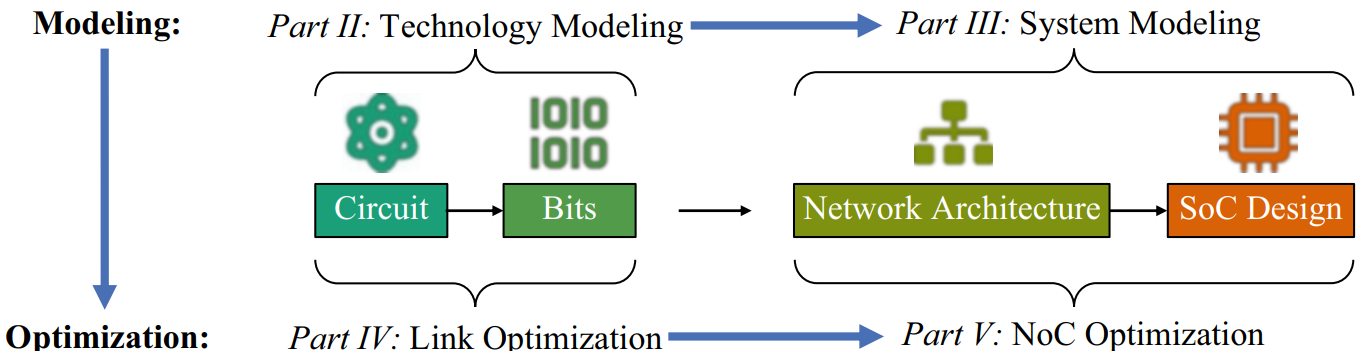
PART-2 3D Technology Modeling
Chapter-3 High-Level Formulas for the 3D-Interconnect Power Consumption and Performance
对于稍微有点规模的NoC,电路仿真所需消耗的时间极大,达到不可实现的量级。使用SystemC等仿真器可以大幅节约时间。这些仿真器基于对系统的建模(包括功耗、性能、电容、Application Traffic等)。本章讨论对Power和Performance的建模。
Power的建模


只考虑耗散的能量(dissipated energy),$E_i(k)$表示第i个节点在第k个时钟周期的耗散能量。$C_{i,i}$表示第i个节点自身的电容,$C_{i,j}$表示第i个节点和第j个节点的耦合电容(coupling capacitance)。$b_i[k]$表示第i个节点在第k个时钟周期的输入比特值。$\Delta b_i[k]$表示第i个节点在第k个时钟周期和第k-1个时钟周期的输入比特值变化。
式3.13表示所有节点的信号变化边沿都完全对齐时的第i个节点在第k个时钟周期的耗散能量。
式3.15表示所有节点的信号变化边沿不对齐(misalign)时的第i个节点在第k个时钟周期的耗散能量。
可见,自身的电容在两种情形下都会参与组成耗散能量。
信号变化边沿完全对齐时,如除i之外的节点输入比特值都不变化(即$\Delta b_j[k]=0$),则耦合电容会贡献一倍的耗散能量。如除i之外的节点输入比特值与i反向变化,则耦合电容贡献的耗散能量会翻倍(miller效应,也叫crosstalk)。如除i之外的节点输入比特值与i同向变化,则耦合电容不贡献耗散能量。
信号变化边沿不对齐时,可以理解为除i之外的节点输入比特值不变化(因为变化时间不一样),即耦合电容会贡献一倍的耗散能量。
由上述两式,可得考虑耦合、自身电容的总的节点i在第k个时钟周期的等效电容为

平均功耗可以表示为:

其中

传播延迟(propagation delay)的建模
传播延迟:source变化的50%–>dest变化的50%,决定NoC能跑到的最高频率。

其中$R=R_D+R_C$,前者是driver固有的电阻,后者是interconnect的电阻
$T_{D,0}$是考虑了不理想driver的固有延迟
$b_i$没有变化时,propagation delay=0(因此时$C_{eff,i}=0$)
总而言之,只要能有效降低$C_{eff,i}$,就可以有效提高performance
TSV排列成矩阵时的建模
总的电容

总的传播延时

Chapter 4 High-Level Estimation of the 3D-Interconnect Capacitances
传统的TSV电容模型


TSV电容的Edge Effect



如图,由于edge effect,处在TSV矩阵边缘一圈的TSV之间会有更大的电场;比如3和5,虽然不相邻,但电场却很大。电场大–>耦合电容大,即TSV矩阵边缘一圈的TSV(尤其是处在四个corner的TSV)的耦合电容会比内部的更大一些。
TSV的edge effect带来的影响要显著大于二维情形下不同wire平行排布。二维情形平行排布下,只会有两个edge(两端),edge占比不大,edge effect不显著;TSV情形下,如5×5 array,64% TSV处于edge,edge effect显著。
TSV更准确的电容模型(略)
PART-3 System Modeling
Chapter-5 Models for Application Traffic and 3D-NoC Simulation
现有NoC仿真器的局限性
没有考虑工艺因素(Technology properties)
即没有考虑router在不同工艺下的最高时钟频率变动,没有考虑不完全同步的通信,没有考虑router和components在不同工艺下的area footprint
没有考虑不规则的网络拓扑
没有考虑3D NoC特有的traffic pattern和benchmark
NoC仿真模型所需具备的要素:accurate, adjustable, precise, versatile
Chapter-6 Estimation of the Bit-Level Statistics
后续需总结
Chapter-7 Ratatoskr: A Simulator for NoCs in Heterogeneous 3D SoCs
后续需总结
PART-4 3D-Interconnect Optimization
Chapter-8 Low-Power Technique for 3D Interconnects
总体目标:减少TSV之间的耦合电容对Power consumption的影响。
对于correlated data streams,越低位翻转频率(switching activity)越高,越高位翻转频率越低。又由于在TSV array中,四个corner的overall capacitance最低;四个edge次之,越往中心越高。因此可以采用如下Spiral的net-to-TSV assignment。
对于正态分布(normally distributed)的uncorrelated data streams,每个bit的翻转频率(switching activity)都是1/2,但是两个MSB之间的翻转相关性很高(switching correlation),两个LSB之间的翻转相关性相对较低。翻转相关性较高的一对bit应该分配给耦合电容较大的一对TSV。在TSV array中,corner和其相邻的edge之间的耦合电容最大。因此MSB分配到corner,下一个分配到与之相邻的edge,再下一个分配到与已经分配的两个TSV之间耦合电容最大的第一行第二排,再下一个分配到与已经分配的三个TSV之间耦合电容最大的第二行第二排。锯齿状分配完两行之后,后面两行直接row-by-row分配。

TSV传输数据的低功耗编码方法
格雷码编码+取反。
格雷码编码的第i位输出=第i位输入XOR第i+1位输入
格雷码编码可以有效降低sequential correlated data stream的功耗,因为编码前数据的MSB翻转频率不高,因而编码后数据的MSB翻转频率也不高
格雷码编码也可以有效降低正态分布的data stream的功耗,因为这类data stream的两个MSB之间翻转相关性很高,经过XOR之后,0的概率很大,等价于降低了翻转频率。
然而,TSV传0比传1不划算。在一般p掺杂的衬底中,TSV就像MOS结构中的metal gate,substrate就像MOS结构中的body。传0时,衬底会产生一个耗尽区,增大TSV之间的耦合电容,进而增大power consumption。传1时,不会产生耗尽区,功耗较小。
因此,需要在GRAY编码后,取反,以提高1的概率,降低功耗。

如图,低功耗编码结合上power-optimal的TSV assignment,可以达到很好的功耗节省。
Chapter-9 Low-Power Technique for High-Performance 3D Interconnects
金属线/TSV的总电容建模

Ci,i是自身的接地电容,$\Delta b_i^2 [k]$表征翻转频率
$C_{i,j}$是第i个金属线/TSV和第j个金属线/TSV之间的耦合电容,$\delta_{i,j}[k]$表征翻转相关性。0代表同向翻转,1代表一个翻转了,2代表反向翻转。
仅考虑信号沿翻转时刻对齐(temporal aligned signal edges)的情形。
金属线/TSV的crosstalk串扰建模

对于金属线,只需考虑左右的耦合电容$C_{mw,c}$和接地电容$C_{mw,g}$。则metal-wire crosstalk的取值范围是$0, 1C_{mw,c},2C_{mw,c},3C_{mw,c},4C_{mw,c}$。最大的情形在左右两个金属线都和自身翻转方向相反时取到。
对于TSV,需要考虑的耦合电容更多。对于处于中间的TSV,需要考虑上下左右四个直接相邻TSV的耦合电容$C_{n,prev}$和四个对角相邻(diagonally adjacent pair)TSV的耦合电容$C_{d,prev}$,总共是$8C_{n,prev}+8C_{d,prev}$,因为$C_{n,prev}=4C_{d,prev}$(一般来说,记$\lambda_{d,prev}=0.25$),所以总共可以看成10个$C_{3D}$(即$C_{n,prev}$)。
如果考虑边缘效应,对于5×5的TSV array,处在第一行第三排的edge TSV面临的最大电容是$2+4\lambda_d+\lambda_{e0}+4\lambda_{e1}+4\lambda_{c2}C_{3D}$。处于corner的TSV面临的最大电容是$2\lambda_d+\lambda_{c0}+4\lambda_{c1}+4\lambda_{c2}C_{3D}$


现存用以减少金属线/TSV之间串扰的低功耗编码方法
对于金属线,不允许左右两根线同时往相反方向翻转
对于TSV,给定一个限值,上下左右及对角的TSV往相反方向翻转的数量不得超过该限值
本书提出的同时优化金属线/TSV,同时优化中间/边缘TSV串扰的低功耗&高性能编码方法
前序方法:FPF-CAC(Forbidden-pattern free)和FTF-CAC(Forbidden-transition free)
FPF-CAC禁止在codeword中出现101或者010。这样可以防止左右两根金属线往相反方向翻转
FTF-CAC禁止在codeword的奇-偶位(比如第3-第4位)出现01,禁止在codeword的偶-奇位出现10,这样也避免了左右两根金属线往相反方向翻转
这两种编码方法的bit overhead都是44%,最大串扰都控制在$2C_{mw,c}$
本书方法(FTF+BP+Snake Mapping)没看懂,暂略