亚稳态
亚稳态即电路正常工作时,信号值不是稳定的0或1(最关键的是,在“信号被采样”时,不是稳定的0或1)
跨时钟域情形下,亚稳态是不能避免的,但是其影响可以被尽可能消除。
两种跨时钟域同步的情形(CLKA –> CLKB)
- 对于某些跨时钟域信号,仅需要保证时钟域B采到的值准确,不需要保证采到时钟域A的每个值
- 比如异步FIFO中的格雷码计数器,可以采丢一些值,但不能采错
- 对于某些跨时钟域信号,既需要保证时钟域B采到的值准确,也需要保证采到时钟域A的每个值
- 这种情形下要求带反压,时钟域B还没采到,时钟域A下的值就不许变化(ACK机制)
最简单的同步器:Two flip-flop synchronizer
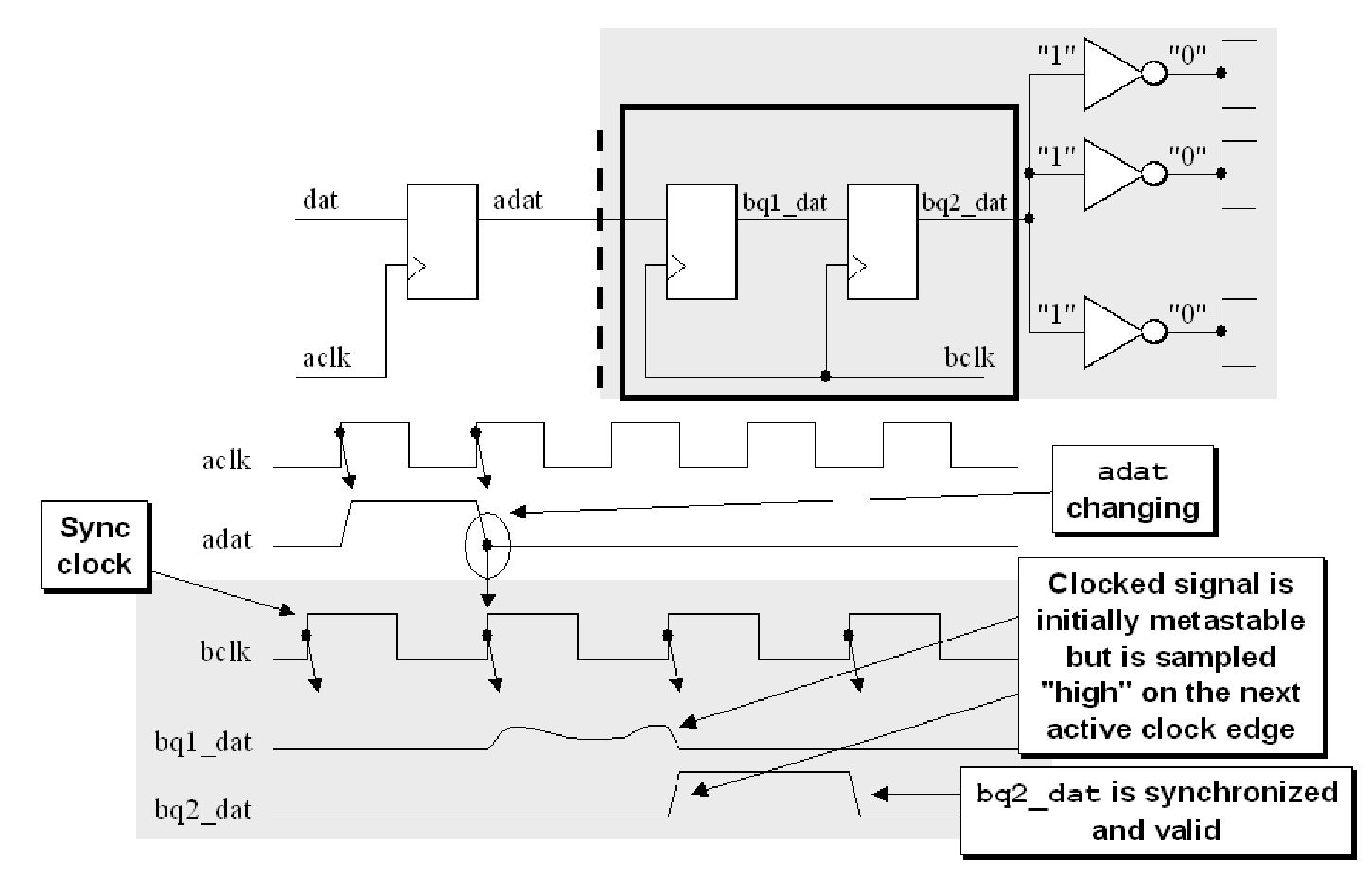
同步器的第一个触发器把aclk域的adat采样到bclk域,等足足一个周期,由第二个触发器采样到稳定、正确的信号给到bclk域的内部模块(其实就是赌一个周期内采样到的信号可以稳定下来)(数据变化的时间离被时钟采样的时间越近,采样到的数据所需的稳定时间越长,two flip-flop synchronizer同步失败的可能性也越高,即MTBF越低)
MTBF—-mean time before failure
MTBF指:信号跨越CDC边界时平均多长时间会出现一个failure
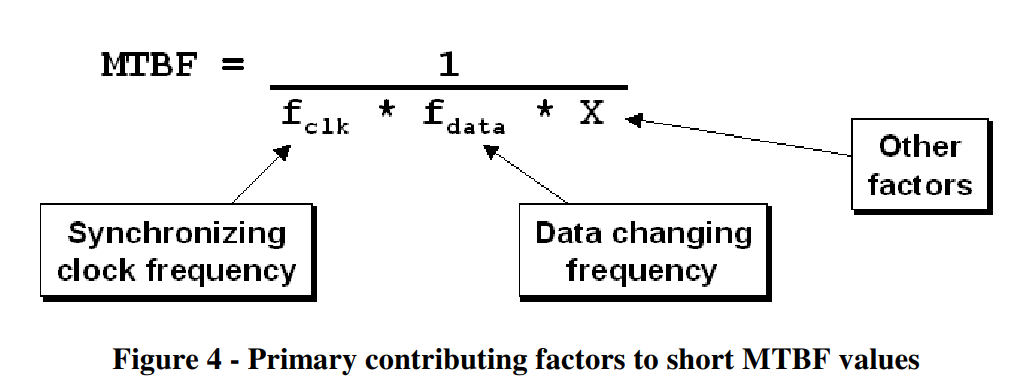
synchronizer的MTBF主要与两个因素有关。一个是bclk时钟的频率,频率越高,MTBF越短;另一个是待采样数据变化的速度,变化速度越快,MTBF越短
–> 高速设计中,MTBF更短
three flip-flop synchronizer
在超高速设计中,两个flip-flop不够同步,可以选用three flip-flop synchronizer。
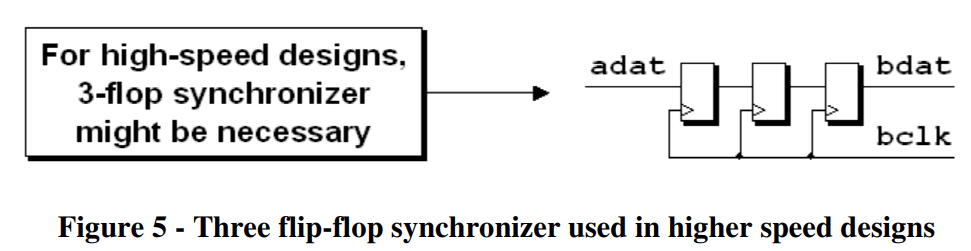
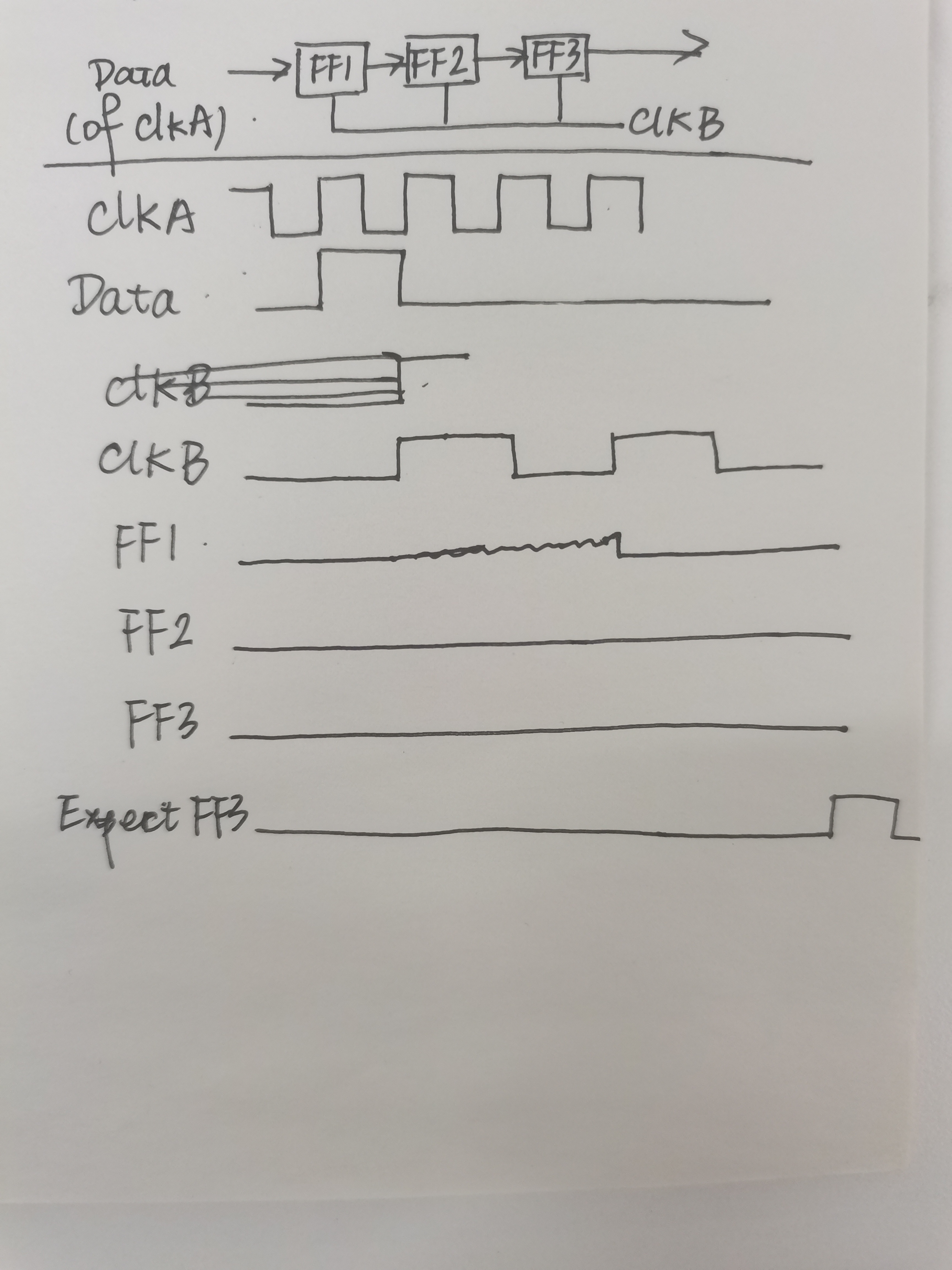
思考:如果数据变化很快,那三个触发器也不管用,因为FF1采样到的数据还没稳定下来,就采样到了变化的数据。如下图。
为什么需要在aclk域预先将要CDC的signal给registered一下
因为如果不registered一下,暴露给bclk域的就有可能是不稳定的组合逻辑(即:组合逻辑的输出还没稳定下来, combinational settling process),这样bclk域可能采到不稳定的组合逻辑
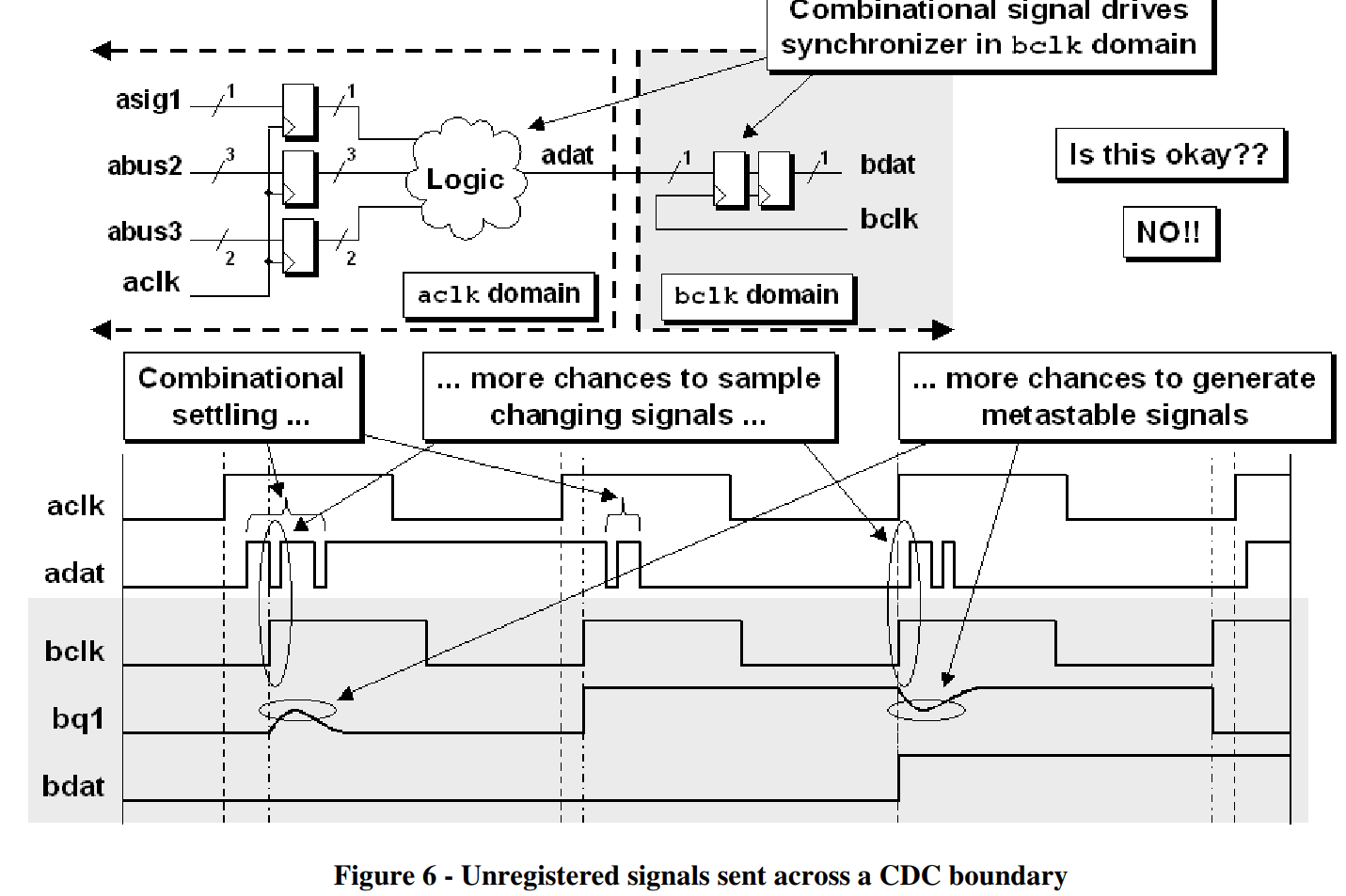
通过在aclk域sync一下要CDC的信号,其实等价于降低了bclk看到的数据变化的频率,也即提高了MTBF
快时钟域(aclk) –> 慢时钟域(bclk)的方法(不允许漏采时)
两种办法:
- 开环的方法:无ack,信号保持稳定至少bclk的三个时钟沿(three edge requirement)
- 优势:比闭环的方法快
- 劣势:给bclk域的工程设计带来难度(不确定bclk域能采到几个周期的信号)
- 闭环的方法:有ack
- 优势:稳定,非常安全
- 劣势:慢
问题:为什么信号要保持稳定至少bclk三个时钟沿的时间?
一个时钟沿肯定不行
如果保持稳定两个bclk时钟沿的时间,可能出现:信号两次变化的时间刚好是bclk两次翻转的时间 的状况,从而导致漏采,如下图。
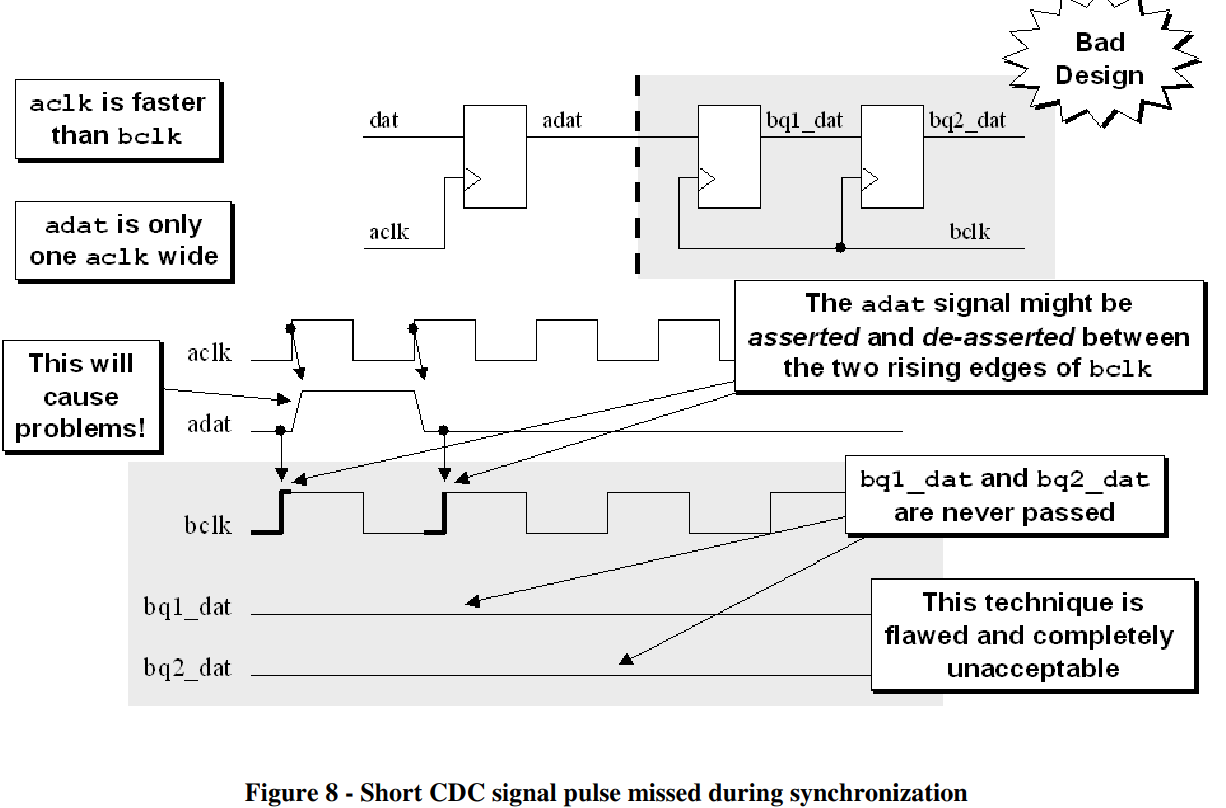
所以最少保持3个时钟沿,比较可靠
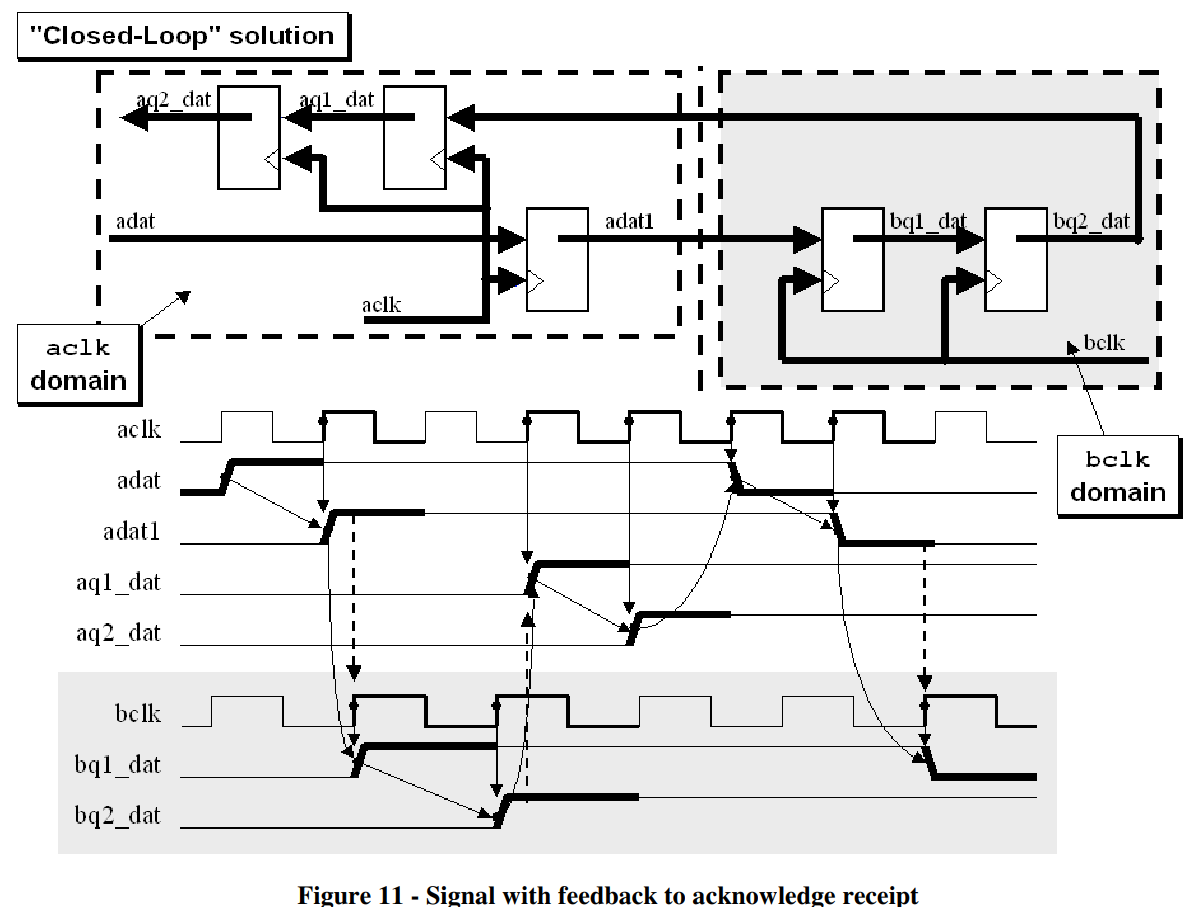
闭环的方法:有ack
发adat过去,对面收到后原封不动送回来(也就是aclk–> bclk,bclk –> aclk,跨两次时钟域),检测到adat和aq2_dat一致,才允许adat变化
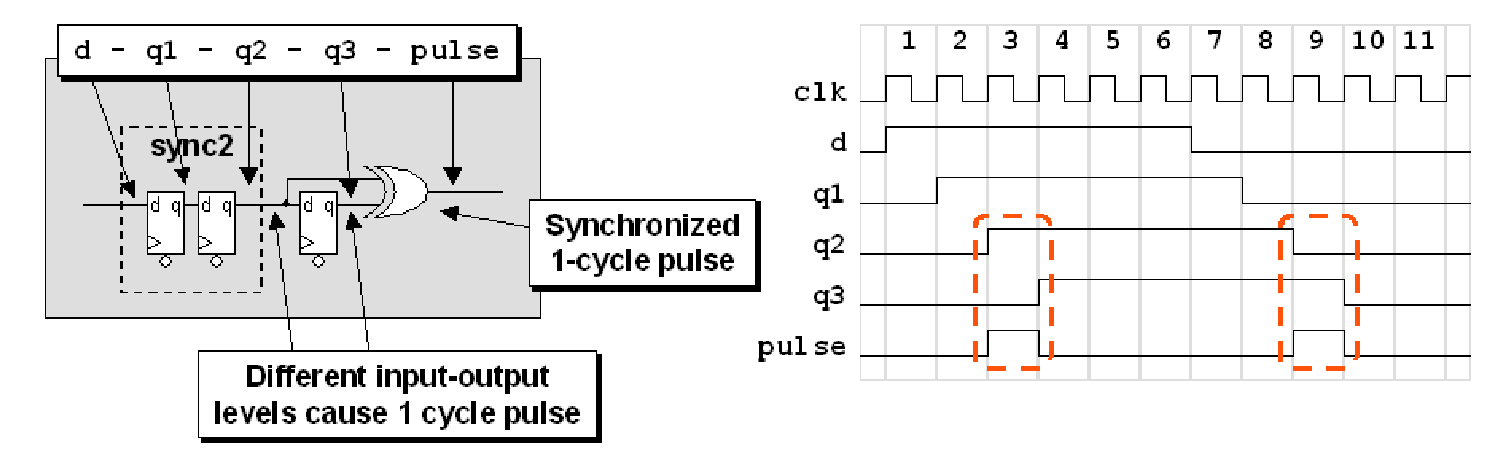
verilog实操:(电平翻转法)
源时钟域 (clk_a):每当检测到一个脉冲,就翻转一个寄存器 q_a 的状态(从 0 变 1,或从 1 变 0)。这样,窄脉冲就变成了一个长电平信号。
跨时钟域:使用两级触发器将 q_a 同步到目标时钟域 clk_b,得到 q_b_s2。
目标时钟域 (clk_b):对同步后的电平信号进行边沿检测(双边沿检测),只要电平发生了变化,就说明源端产生了一个脉冲。
这个电路中,源时钟域 clk_a 两个脉冲之间的间隔必须足够长,以确保 clk_b 能够采样到翻转后的电平。两个脉冲之间的最小间隔应大于 2 倍的接收端时钟周期 ($2 \times T_{clk_b}$)。否则,电平翻转太快,clk_b 还没来得及采样到上一次的变化,状态就又翻转回去了。
module pulse_sync (
input wire clk_a,
input wire rst_n_a,
input wire pulse_a_in,
input wire clk_b,
input wire rst_n_b,
output wire pulse_b_out);
reg q_a;
reg q_b_s1, q_b_s2, q_b_s3;
// 1. 在 clk_a 域:将脉冲转换为电平翻转
always @(posedge clk_a or negedge rst_n_a) begin
if (!rst_n_a)
q_a <= 1'b0;
else if (pulse_a_in)
q_a <= ~q_a; // 翻转
end
// 2. 将翻转电平同步到 clk_b 域 (打两拍)
always @(posedge clk_b or negedge rst_n_b) begin
if (!rst_n_b) begin
q_b_s1 <= 1'b0;
q_b_s2 <= 1'b0;
q_b_s3 <= 1'b0; // 用于边沿检测的延迟拍
end else begin
q_b_s1 <= q_a;
q_b_s2 <= q_b_s1;
q_b_s3 <= q_b_s2; // 再多打一拍用于对比
end
end
// 3. 在 clk_b 域:检测电平变化 (双边沿检测)
// 只要 q_b_s2 和前一拍 q_b_s3 不同,说明 clk_a 翻转了状态
assign pulse_b_out = q_b_s2 ^ q_b_s3;
endmodule
多bit跨时钟域会遇到的问题
多比特之间信号不同步,一方面是设计上信号通路的长度不一致;另一方面是工艺的波动。这两方面导致不同比特可能被bclk的不同rising edge或falling edge采到,从而导致bclk域的功能错误。
多bit跨时钟域的三种方法
- 多比特合成一比特,然后再跨时钟域
- aclk域中要跨时钟域的信号能合成则合成:比如aclk时钟域中有信号C和D,bclk时钟域需要C&D,这个时候应该选择在aclk域先合成C&D,再将C&D传送至bclk时钟域
- 多bit数据直传(不加任何fifo),加一位单比特控制位去跨时钟域
- 格雷码传输多bit
多bit数据直传,加1位控制位去跨时钟域
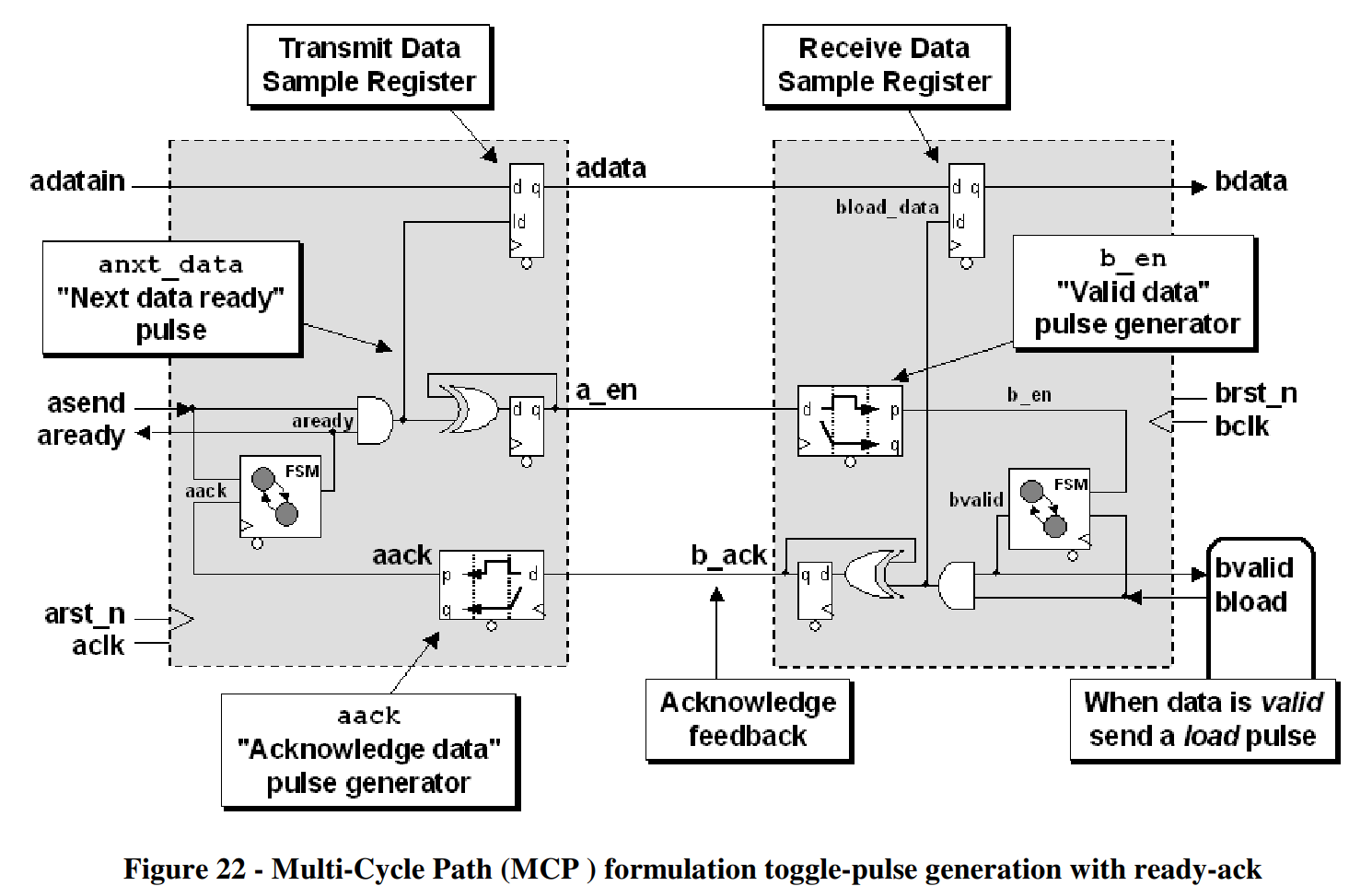
比如要发adatain到右边的时钟域。
在上一笔传输完成之后(aready拉高)之后,与adatain同时到来的asend拉高Transmit Data Sample Register的load,指示adatain可以直传到adata(没有任何fifo)。
bclk域此时不采样adata,就晾在那里,等a_en(电平信号)通过一个pulse generator生成了一个脉冲并且bclk域准备好接收的时候产生bvalid,进而产生bload,将data采样。由此完成data的传输。
(上述这个pulse generator其实就是寄存器打两拍后面再加一个跳变沿检测器(异或门),如下图)
之后bclk域产生back,同样经过一个pulse generator(寄存器打两拍后面再加一个跳变沿检测器(异或门))回到aclk域,经过一个状态机,释放bready,从而允许adatain改变,也就允许了下一笔传输的发生。
这个结构很安全,一方面,给了多bit数据很多个时钟周期去满足跨时钟域的采样要求(让这些数据等使能信号跨完时钟域再走完状态机,很漫长)。另一方面,有ack机制,很安全。
格雷码和binary的互转
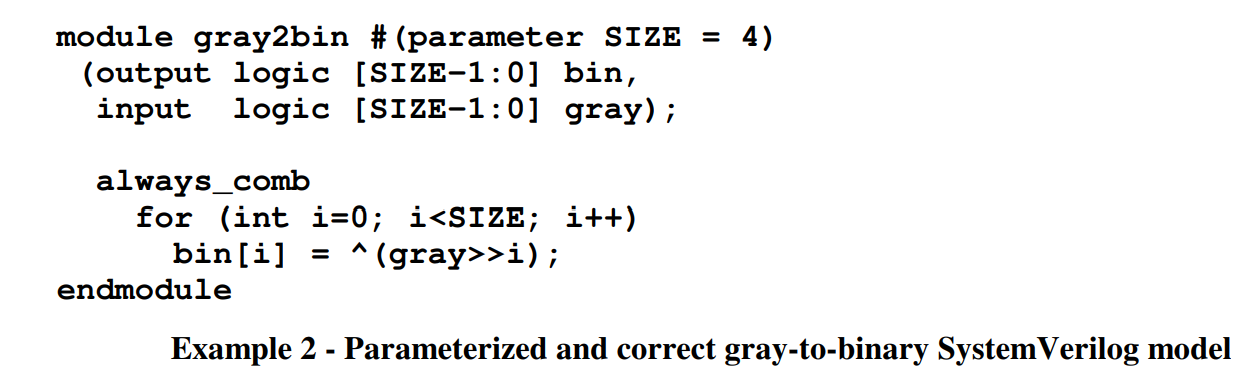
格雷码转二进制
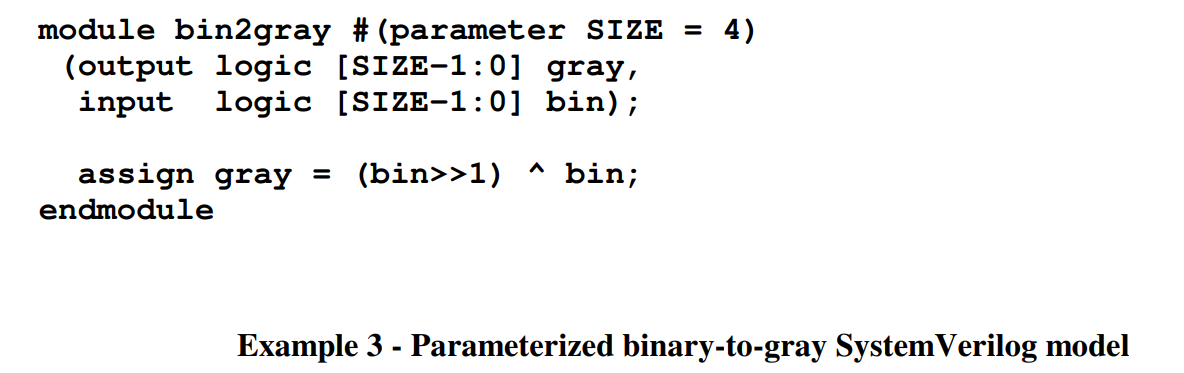
二进制转格雷码
异步FIFO
参考知乎
异步FIFO内部的大体框图
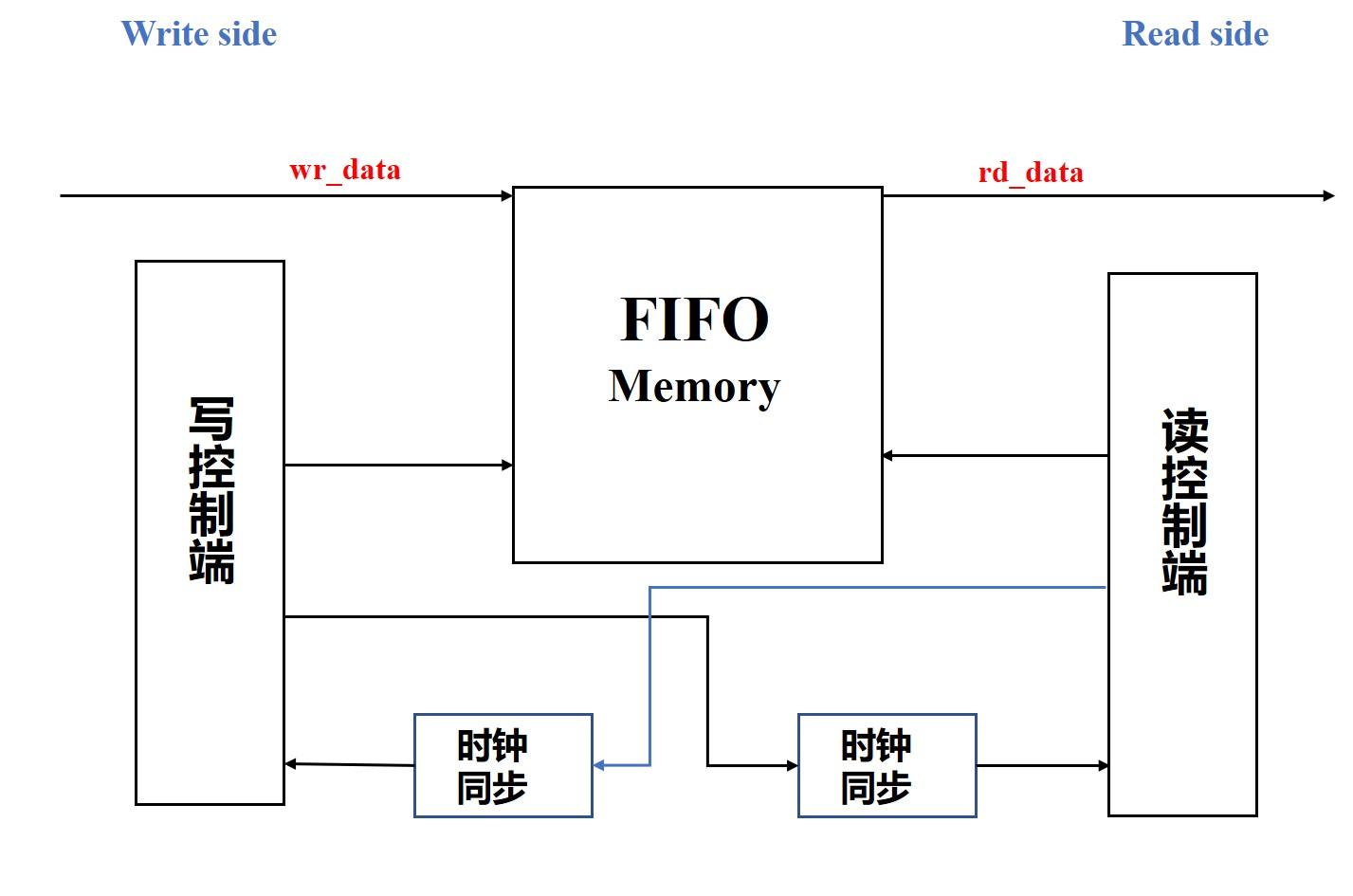
异步FIFO主要由五部分组成:写控制端、读控制端、FIFO Memory和两个时钟同步端
写控制端用于判断是否可以写入数据 读控制端用于判断是否可以读取数据 FIFO Memory用于存储数据 两个时钟同步端用于将读写时钟进行同步处理
介绍完内部结构,我们在和基本接口图做个联动
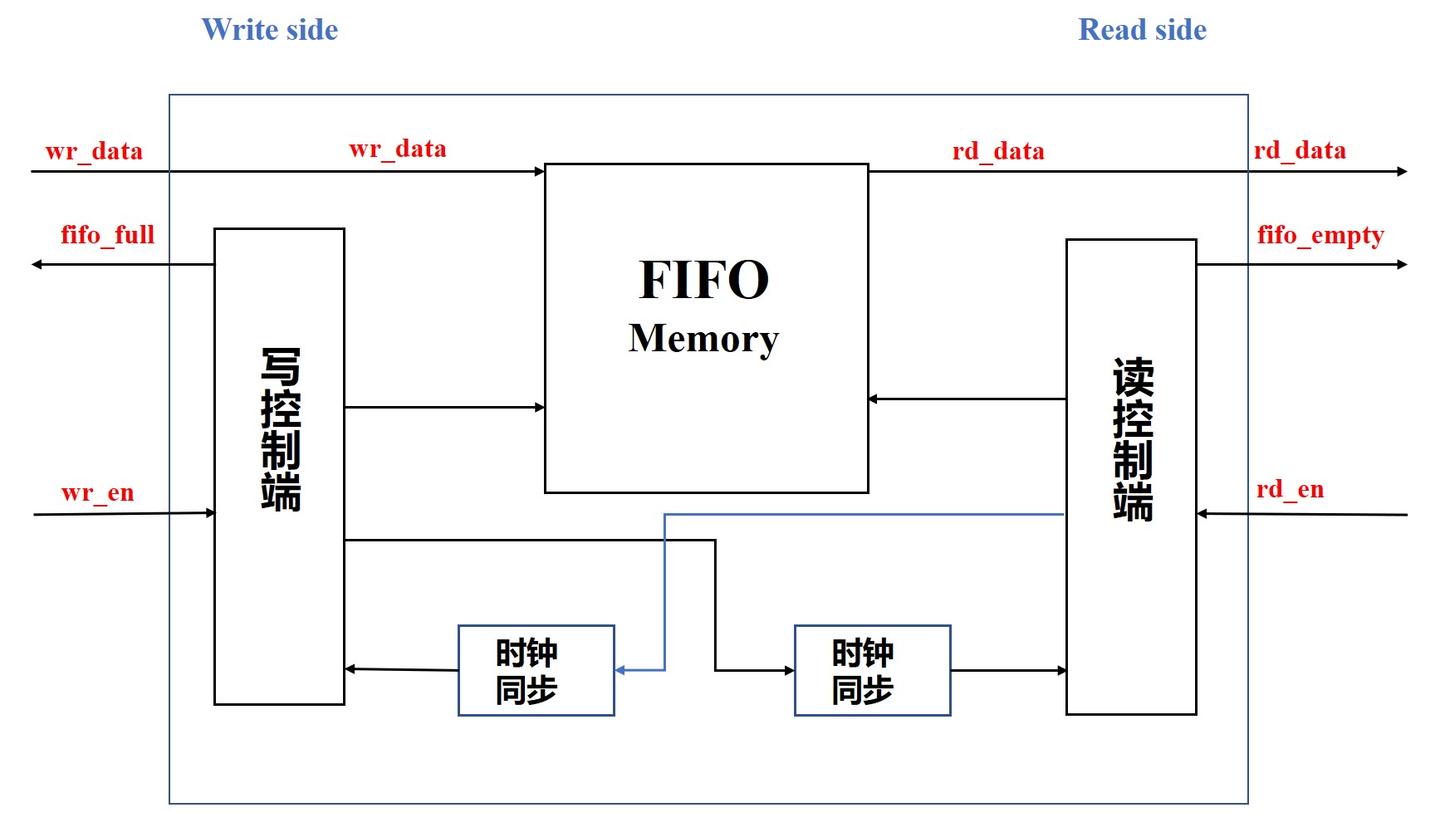
刚才说过,读/写控制端用于判断能否写入/读取数据,判断能否写入/读取数据关键在于:
- 写操作时,写使能有效且FIFO未满
- 读操作时,读使能有效且FIFO未空
因此两个使能信号和空满判断信号都连接到控制端上
最后我们再加上时钟信号和复位信号
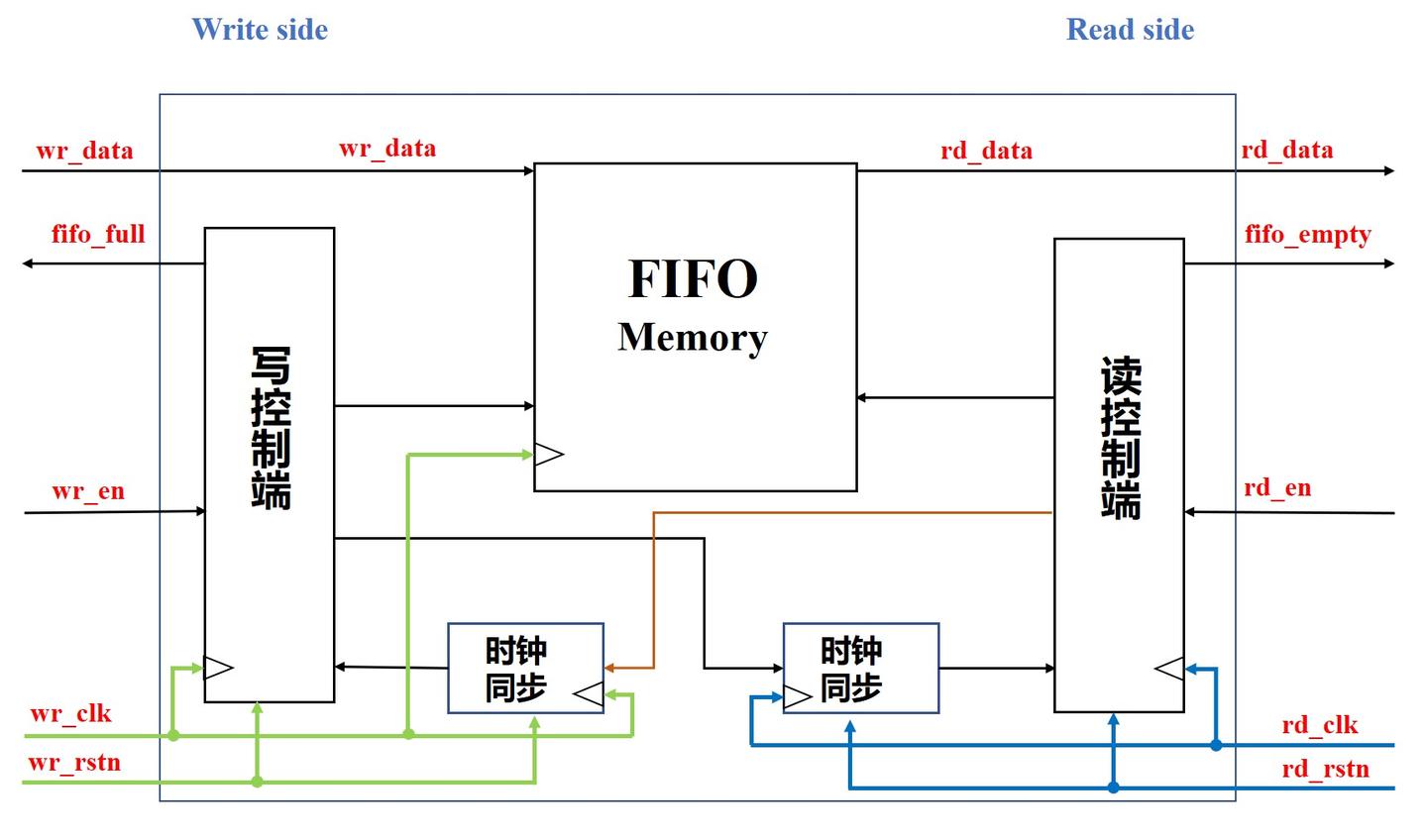
这便是完整的异步FIFO简化框图
2 空满判断
在同步FIFO篇中,我们给出了两个判断空满状态的图
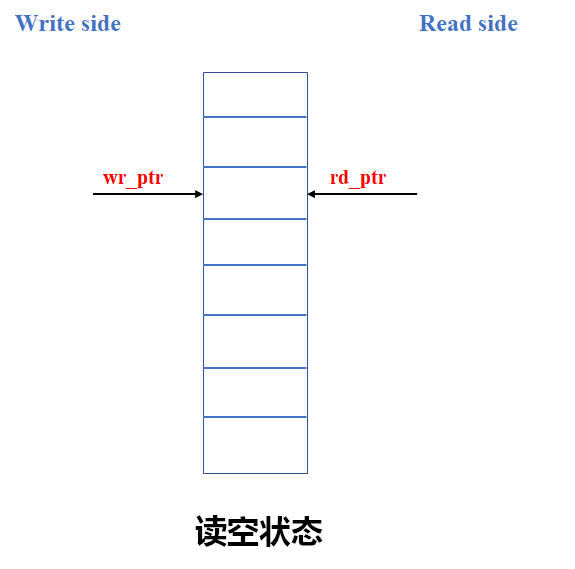
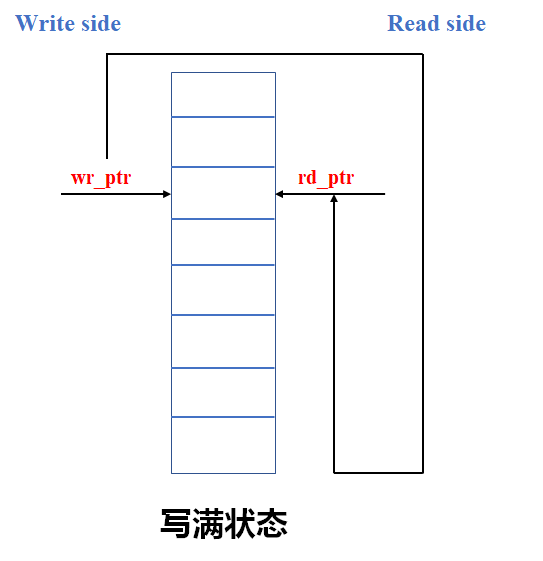
并且也有指出,读空状态可以理解为读地址指针追上写地址指针,写满状态可以理解为写地址指针再次追上读地址指针
在同步FIFO中,因为读写都是在同一个时钟信号下进行的,因此两个地址指针可以直接进行比较
但在异步FIFO中,读写是在不同的时钟信号下进行的,因此在进行比较之前,应当先进行跨时钟与同步
在时钟同步之前,我们应当先将二进制地址转换为格雷码,因为格雷码相邻的两个状态之间,只有1 bit数据发生翻转
下面给出二进制数与格雷码的对照图
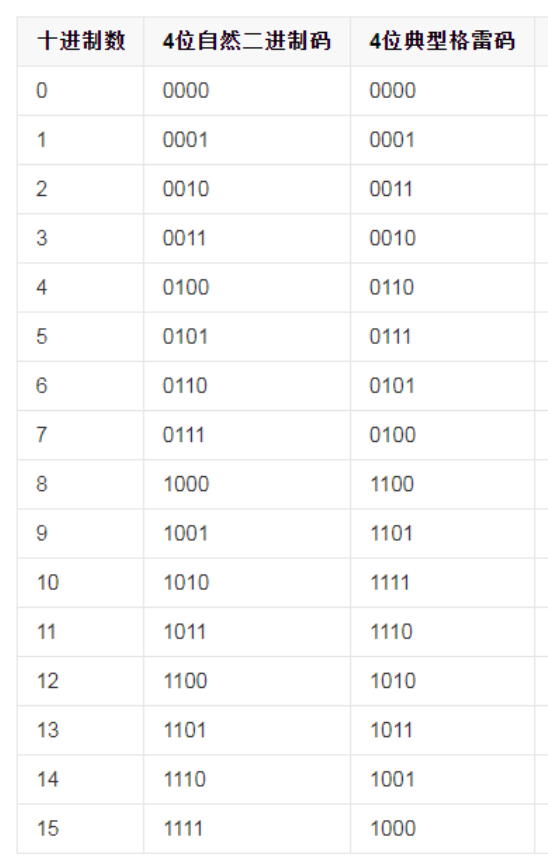
上面也有说到,读指针追上写指针是读空,写指针再次追上读指针是写满,为了便于理解,我们做一个环形图
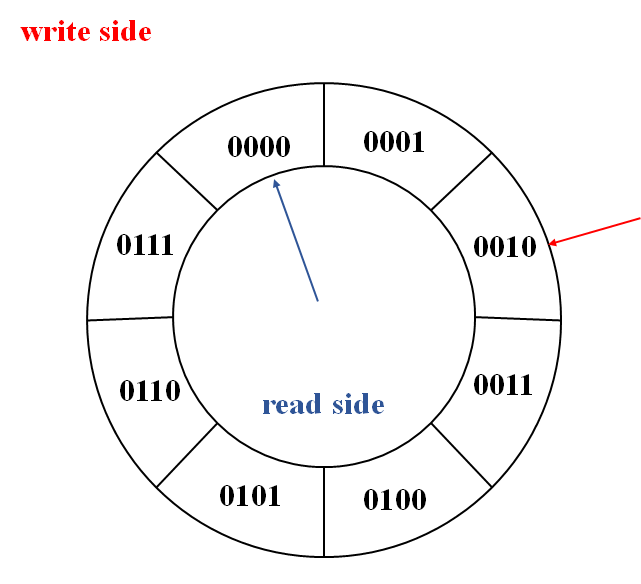
假设内圈为读,外圈为写,读空时是读写指针应当指向同一个地址,就像这样
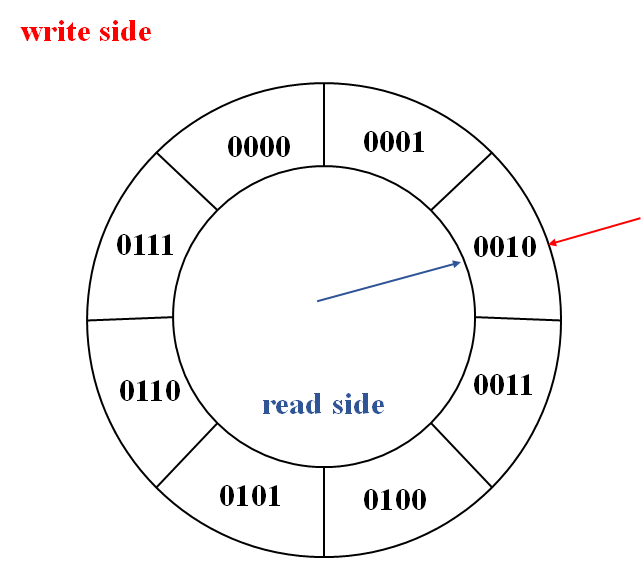
此时,读地址应当和写地址完全相同,就以0010为例,0010的格雷码为0011,可以看出对于读空状态,无论是二进制还是格雷码均是所有位都相同
写满和读空略有不同,应当是下面这样
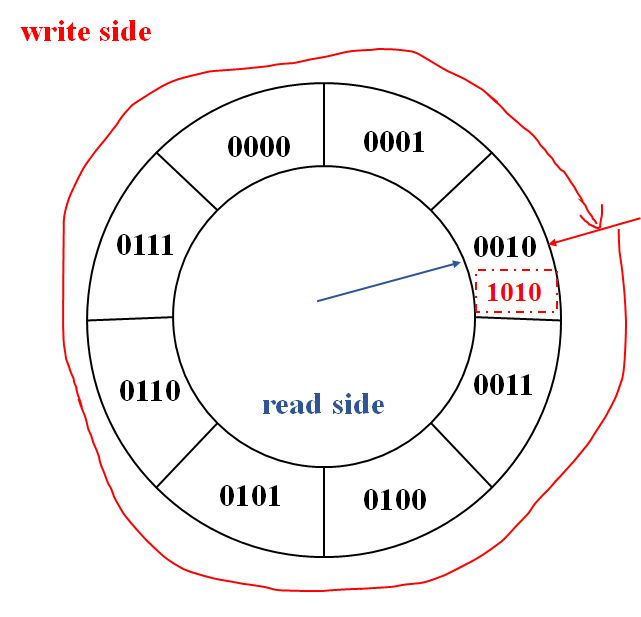
细心的小伙伴应该可以发现,上面在提到写满时,说的是写指针再次追上读指针,也就是说,写满时,写指针比读指针多走一圈,为了便于区分,将地址位宽从3 bit拓宽到4 bit,因此此时的写指针地址可以认为是1010
1010的格雷码是1111, 0010的格雷码是0011,对比两个格雷码是不是可以发现,此时高两位相反,低两位相同,这便是格雷码下写满的判断条件
Verilog中表示为
//写满判断
always @ (posedge wr_clk or negedge wr_rstn) begin
if(!wr_rstn)
fifo_full <= 0;
else if((wr_ptr_g[$clog2(DEPTH)] != rd_ptr_grr[$clog2(DEPTH)]) && (wr_ptr_g[$clog2(DEPTH) - 1] != rd_ptr_grr[$clog2(DEPTH) - 1]) && (wr_ptr_g[$clog2(DEPTH) - 2 : 0] == rd_ptr_grr[$clog2(DEPTH) - 2 : 0]))
fifo_full <= 1;
else
fifo_full <= 0;
end
//读空判断
always @ (posedge rd_clk or negedge rd_rstn) begin
if(!rd_rstn)
fifo_empty <= 0;
else if(wr_ptr_grr[$clog2(DEPTH) : 0] == rd_ptr_g[$clog2(DEPTH) : 0])
fifo_empty <= 1;
else
fifo_empty <= 0;
end
3 时钟同步
在同步FIFO设计中,因为读写指针在同一个时钟下,因此可以直接进行比较
但在异步FIFO中,由于读写指针在不同的时钟下,因此需要将两个地址指针进行时钟同步操作
在异步FIFO中,常用的同步方法是两级同步打拍延迟,同步地址指针的大致过程如下:
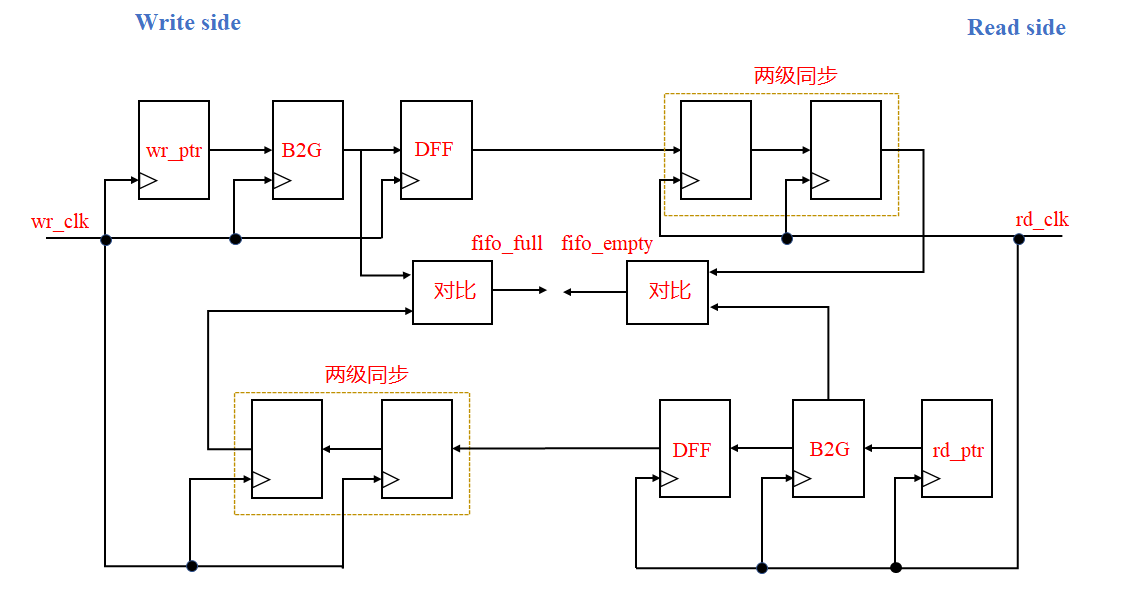
写操作时,先将写地址指针转换成格雷码,然后通过两级同步(两级同步在读时钟下进行),将写地址指针同步到读时钟域下;读操作类似
根据这个过程图,也可以看出空满判断的方式:
- 写满在写时钟下判断,将写地址指针的格雷码与同步过来的读地址指针格雷码进行比较,符合写满条件,即FIFO
虚满 - 读空在读时钟下判断,将读地址指针的格雷码与同步过来的写地址指针格雷码进行比较,符合读空条件,即FIFO
虚空
留意下,这里我说的是虚空/满,并不是输入错误哟,具体解释我放在文章最后,爱思考的朋友现在可以思考一下原因
下面给出时钟同步的Verilog代码
assign wr_ptr_g = wr_ptr ^ (wr_ptr >> 1); //B2G
assign rd_ptr_g = rd_ptr ^ (rd_ptr >> 1);
//写指针同步到读时钟域
always @ (posedge rd_clk or negedge rd_rstn) begin
if(!rd_rstn) begin
wr_ptr_gr <= 0;
wr_ptr_grr <= 0;
end
else begin
wr_ptr_gr <= wr_ptr_g;
wr_ptr_grr <= wr_ptr_gr;
end
end
//读指针同步到写时钟域
always @ (posedge wr_clk or negedge wr_rstn) begin
if(!wr_rstn) begin
rd_ptr_gr <= 0;
rd_ptr_grr <= 0;
end
else begin
rd_ptr_gr <= rd_ptr_g;
rd_ptr_grr <= rd_ptr_gr;
end
end
4 异步FIFO设计
下面给出整体Verilog代码
module asy_fifo#(
parameter WIDTH = 8,
parameter DEPTH = 8
)(
input [WIDTH - 1 : 0] wr_data,
input wr_clk,
input wr_rstn,
input wr_en,
input rd_clk,
input rd_rstn,
input rd_en,
output fifo_full,
output fifo_empty,
output [WIDTH - 1 : 0] rd_data
);
//定义读写指针
reg [$clog2(DEPTH) : 0] wr_ptr, rd_ptr;
//定义一个宽度为WIDTH,深度为DEPTH的fifo
reg [WIDTH - 1 : 0] fifo [DEPTH - 1 : 0];
//定义读数据
reg [WIDTH - 1 : 0] rd_data;
//写操作
always @ (posedge wr_clk or negedge wr_rstn) begin
if(!wr_rstn)
wr_ptr <= 0;
else if(wr_en && !fifo_full) begin
fifo[wr_ptr] <= wr_data;
wr_ptr <= wr_ptr + 1;
end
else
wr_ptr <= wr_ptr;
end
//读操作
always @ (posedge rd_clk or negedge rd_rstn) begin
if(!rd_rstn) begin
rd_ptr <= 0;
rd_data <= 0;
end
else if(rd_en && !fifo_empty) begin
rd_data <= fifo[rd_ptr];
rd_ptr <= rd_ptr + 1;
end
else
rd_ptr <= rd_ptr;
end
//定义读写指针格雷码
wire [$clog2(DEPTH) : 0] wr_ptr_g;
wire [$clog2(DEPTH) : 0] rd_ptr_g;
//读写指针转换成格雷码
assign wr_ptr_g = wr_ptr ^ (wr_ptr >>> 1);
assign rd_ptr_g = rd_ptr ^ (rd_ptr >>> 1);
//定义打拍延迟格雷码
reg [$clog2(DEPTH) : 0] wr_ptr_gr, wr_ptr_grr;
reg [$clog2(DEPTH) : 0] rd_ptr_gr, rd_ptr_grr;
//写指针同步到读时钟域
always @ (posedge rd_clk or negedge rd_rstn) begin
if(!rd_rstn) begin
wr_ptr_gr <= 0;
wr_ptr_grr <= 0;
end
else begin
wr_ptr_gr <= wr_ptr_g;
wr_ptr_grr <= wr_ptr_gr;
end
end
//读指针同步到写时钟域
always @ (posedge wr_clk or negedge wr_rstn) begin
if(!wr_rstn) begin
rd_ptr_gr <= 0;
rd_ptr_grr <= 0;
end
else begin
rd_ptr_gr <= rd_ptr_g;
rd_ptr_grr <= rd_ptr_gr;
end
end
//声明空满信号数据类型
reg fifo_full;
reg fifo_empty;
//写满判断
always @ (posedge wr_clk or negedge wr_rstn) begin
if(!wr_rstn)
fifo_full <= 0;
else if((wr_ptr_g[$clog2(DEPTH)] != rd_ptr_grr[$clog2(DEPTH)]) && (wr_ptr_g[$clog2(DEPTH) - 1] != rd_ptr_grr[$clog2(DEPTH) - 1]) && (wr_ptr_g[$clog2(DEPTH) - 2 : 0] == rd_ptr_grr[$clog2(DEPTH) - 2 : 0]))
fifo_full <= 1;
else
fifo_full <= 0;
end
//读空判断
always @ (posedge rd_clk or negedge rd_rstn) begin
if(!rd_rstn)
fifo_empty <= 0;
else if(wr_ptr_grr[$clog2(DEPTH) : 0] == rd_ptr_g[$clog2(DEPTH) : 0])
fifo_empty <= 1;
else
fifo_empty <= 0;
end
endmodule
下面是tb
module asy_fifo_tb;
parameter width = 8;
parameter depth = 8;
reg wr_clk, wr_en, wr_rstn;
reg rd_clk, rd_en, rd_rstn;
reg [width - 1 : 0] wr_data;
wire fifo_full, fifo_empty;
wire [width - 1 : 0] rd_data;
//实例化
asy_fifo myfifo (
.wr_clk(wr_clk),
.rd_clk(rd_clk),
.wr_rstn(wr_rstn),
.rd_rstn(rd_rstn),
.wr_en(wr_en),
.rd_en(rd_en),
.wr_data(wr_data),
.rd_data(rd_data),
.fifo_empty(fifo_empty),
.fifo_full(fifo_full)
);
//时钟
initial begin
rd_clk = 0;
forever #25 rd_clk = ~rd_clk;
end
initial begin
wr_clk = 0;
forever #30 wr_clk = ~wr_clk;
end
//波形显示
initial begin
$fsdbDumpfile("wave.fsdb");
$fsdbDumpvars(0, myfifo);
$fsdbDumpon();
end
//赋值
initial begin
wr_en = 0;
rd_en = 0;
wr_rstn = 1;
rd_rstn = 1;
#10;
wr_rstn = 0;
rd_rstn = 0;
#20;
wr_rstn = 1;
rd_rstn = 1;
@(negedge wr_clk)
wr_data = {$random}%30;
wr_en = 1;
repeat(7) begin
@(negedge wr_clk)
wr_data = {$random}%30;
end
@(negedge wr_clk)
wr_en = 0;
@(negedge rd_clk)
rd_en = 1;
repeat(7) begin
@(negedge rd_clk);
end
@(negedge rd_clk)
rd_en = 0;
#150;
@(negedge wr_clk)
wr_en = 1;
wr_data = {$random}%30;
repeat(15) begin
@(negedge wr_clk)
wr_data = {$random}%30;
end
@(negedge wr_clk)
wr_en = 0;
#50;
$finish;
end
endmodule