“Flipped” and “Decoupled” in Chisel
Flipped
- Purpose: The
Flippedmethod indicates that a particular port is an input to the module instead of an output. This is particularly useful in the context of module instantiation, where you want to define the direction of a signal. - Usage: By flipping a signal, you indicate that the master (the device initiating the transaction) drives the signal, while the slave (the device responding) receives it.
Decoupled
-
Usually, we use the utility function
Decoupled()to turn any type into a ready-valid interface rather than directly using ReadyValidIO.Decoupled(...)creates a producer / output ready-valid interface (i.e. bits is an output).Flipped(Decoupled(...))creates a consumer / input ready-valid interface (i.e. bits is an input).
-
Take a look at the following example Chisel code to better understand exactly what is generated:
import chisel3._ import chisel3.util.Decoupled /** * Using Decoupled(...) creates a producer interface. * i.e. it has bits as an output. * This produces the following ports: * input io_readyValid_ready, * output io_readyValid_valid, * output [31:0] io_readyValid_bits */ class ProducingData extends Module { val io = IO(new Bundle { val readyValid = Decoupled(UInt(32.W)) }) // do something with io.readyValid.ready io.readyValid.valid := true.B io.readyValid.bits := 5.U } /** * Using Flipped(Decoupled(...)) creates a consumer interface. * i.e. it has bits as an input. * This produces the following ports: * output io_readyValid_ready, * input io_readyValid_valid, * input [31:0] io_readyValid_bits */ class ConsumingData extends Module { val io = IO(new Bundle { val readyValid = Flipped(Decoupled(UInt(32.W))) }) io.readyValid.ready := false.B // do something with io.readyValid.valid // do something with io.readyValid.bits }FIFO vs. queue
FIFO is a specific type of queue focused on the order of operations, while queues can be more versatile and may include various additional functionalities. In hardware contexts, FIFO often refers to a dedicated implementation with specific behavior and performance characteristics.
在D2D这个代码里,QUEUE是对FIFO的调用,体现在给出了fifo.rd.pop的激励。针对FIFO在rd.valid已经拉高但是外部rd.ready没有拉高时(情况1)会造成的rd.bits为不定态/高阻态情况,设计了一套机制,使QUEUE的rd.bits输出“在rd.fire时显示被握手的rd.bits,而在情况1下显示即将但还没被握手的rd.bits“,(以下为推测),目的是???
递归查找文件名:find -r . -name xxx.v
递归查找文件内容:grep -r xxxx .
目标器件:CU106 Evaluation Platform xczu7ev-ffvc1156-2-e
与王学长讨论要点
- PHY.v是一个spice网表,里面的top模块是顶层接口,除了已经列出来的接口外,应该把DATA_IN(tx的输入)和DATA_OUT(rx的输出)接出来(输出时钟也应该接出来)。PHY.v已经把tx和rx的物理层接好了,输入是一个clk和data,输出是一个clk和data
- 用virtuoso可以完成verilog文件的数模混合仿真
- virtuoso有一个定制的库,需要王学长发过来
- 需要用到tsmc28的标准库
BUG: 跑vivado仿真波形提示Unable to open file because file does not have read permission.
问题描述:跑d2d_test_106工程的仿真波形时提示Unable to open file ‘zynq_ultra_ps_e_vip_v1_0_8_apis.sv’ because file does not have read permission. 按照提示点击open directory之后提示Unable to launch the File Browser。
尝试方法1:更改对应文件权限。从775改成777
更改后
关闭simulation窗口,重新开始simulation,没用
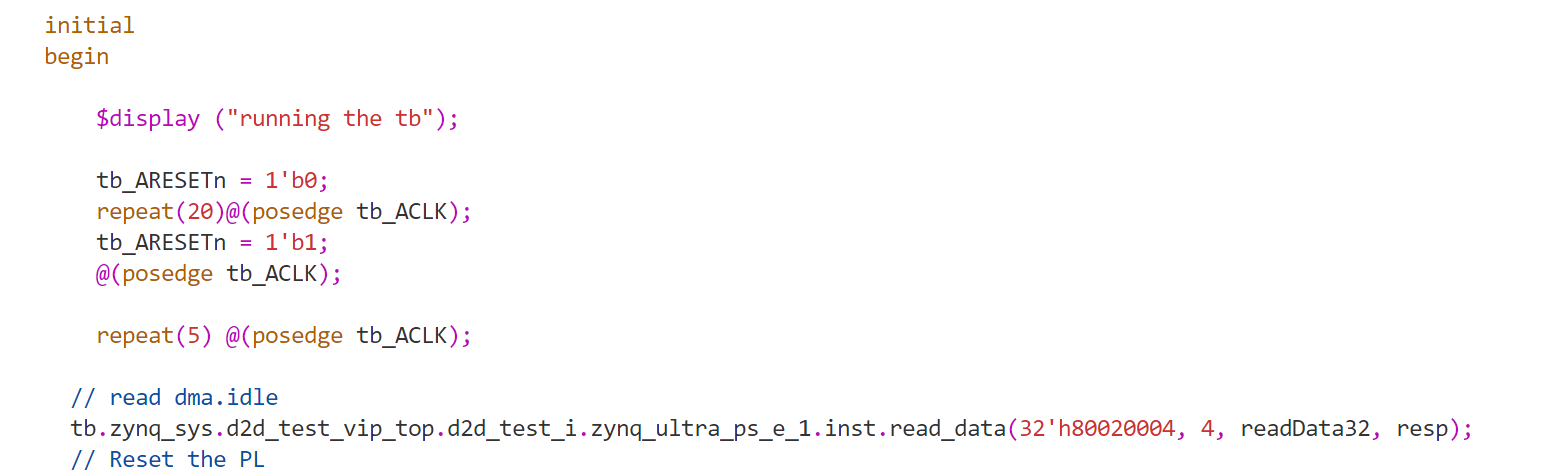
观察Tcl console,卡住的地方如下:

在Vip_test.v中确认卡住的行为第一次出现read_data的行
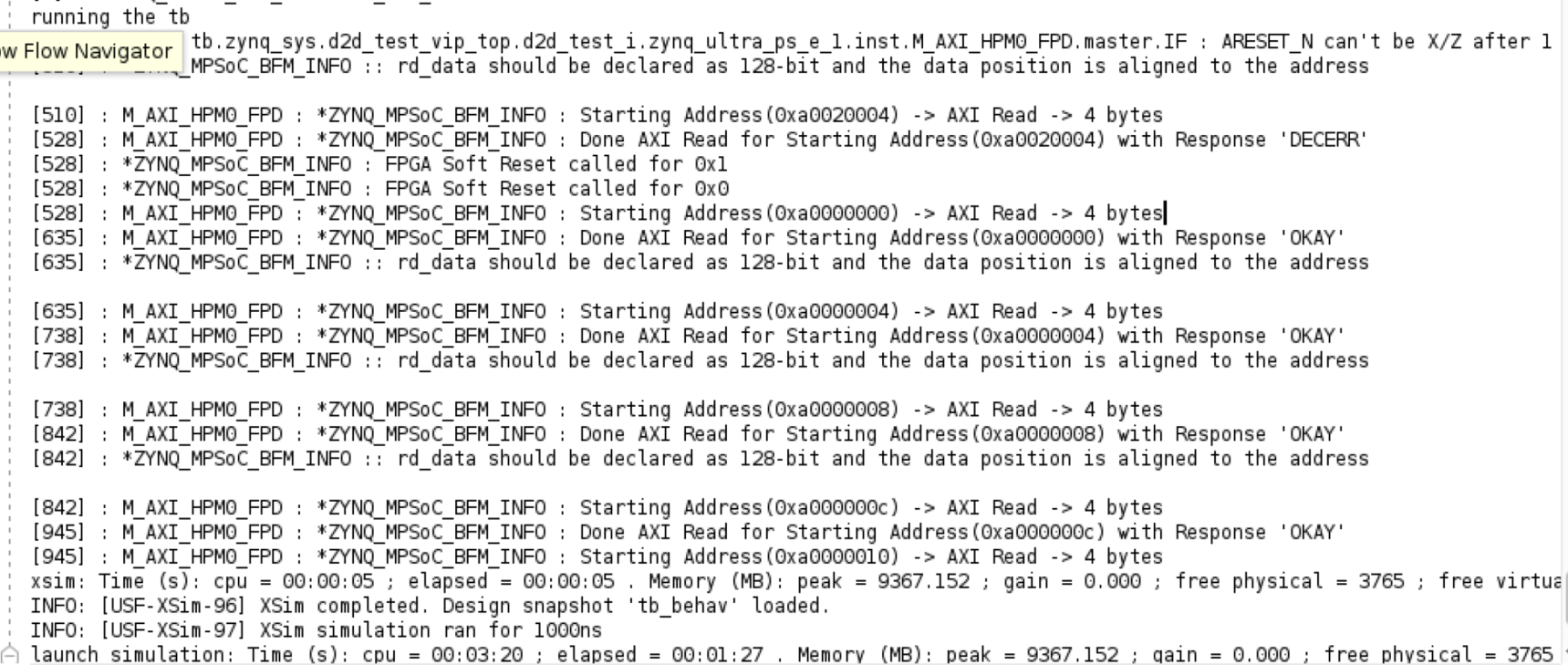
从tcl console中确认,M_AXI_GP0(对应bd中的M_AXI_HPM0_FPD)已经正常ENABLED,而M_AXI_GP2(对应bd中的M_AXI_HPM0_LPD)正常DISABLED。奇怪的是,在510ns的时候,AXI READ操作提示由M_AXI_HPM0_LPD完成,此时M_AXI_HPM0_LPD已经DISABLED,所以自然会报错。
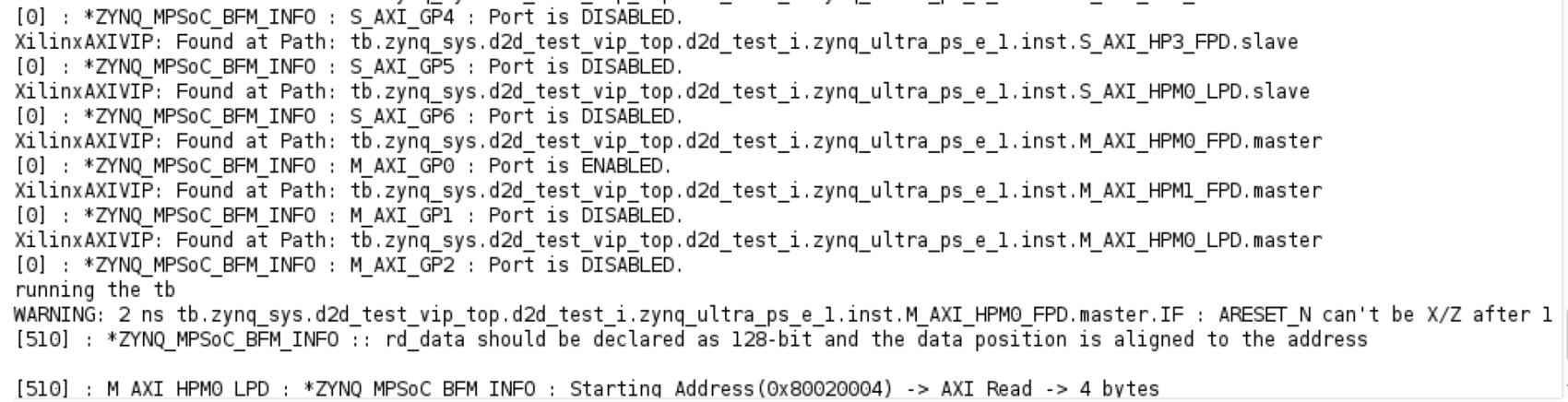
是不是有可能地址域分配错了?
随后由打印出来的信息Starting Address通过全局搜索定位到文件./d2d_test_106.gen/sources_1/bd/d2d_test/ipshared/da1e/hdl/zynq_ultra_ps_e_vip_v1_0_8_apis.sv
一看果然是这个问题。可见VIP_test.sv中指定的0x80020004地址属于M_AXI_HPM0_LPD的地址域(即start_addr[31:28]===4’b1000),所以传输失败。
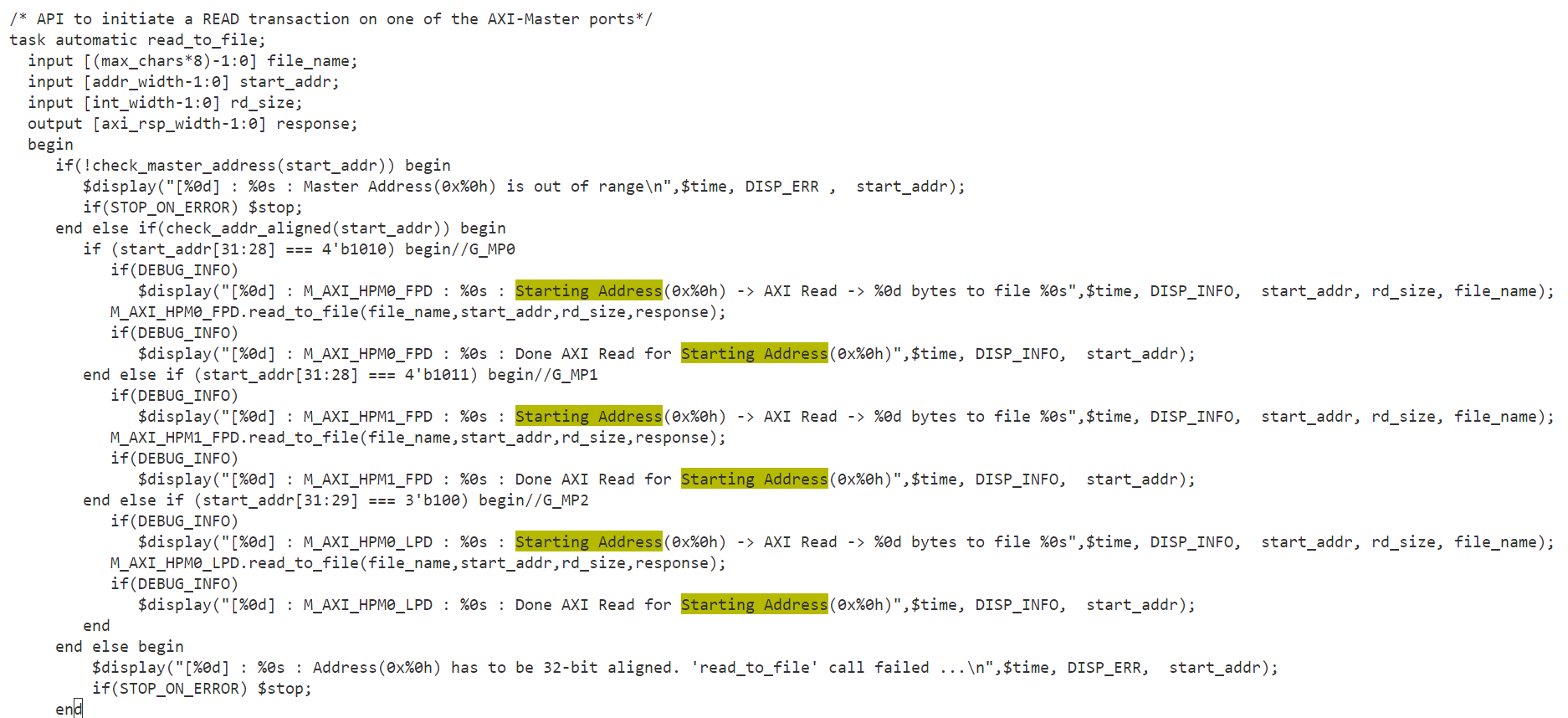
尝试改为M_AXI_HPM0_FPD的地址域start_addr[31:28]===4’b1010,即最高位为a。将VIP_test.sv中所有的最高位由8改为a,可以work,输出结果如下:
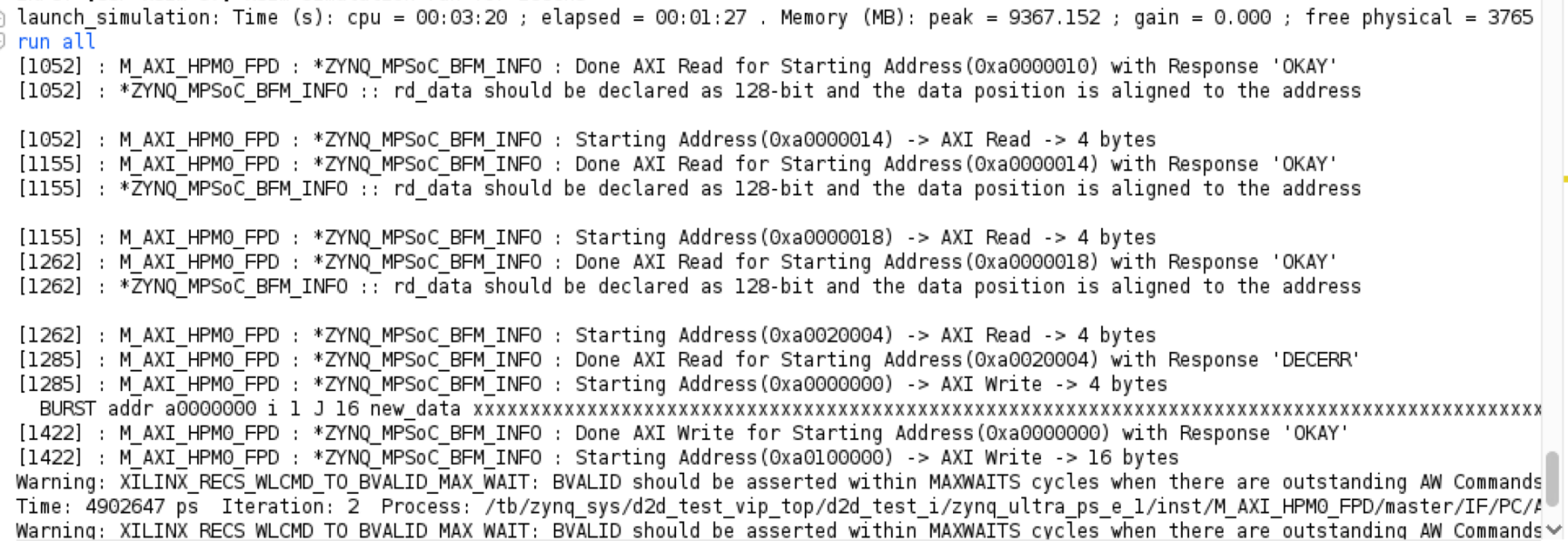
尝试将访问dma.idle的地址从0xa0020004改成0xa0200004,response会显示OKAY。

观察地址分配发现0xa2000004才是正确的CDMA.idle的地址(emmmmm),重新实验
数模联合仿真可以参考的比较详细的flow:
VCS+XA (两个软件都可以通过module load加载)
参考博客
数模混合仿真实例(数字verilog作为顶层)VCS+Xa (qq.com)
也可以使用VCS与hsim、finesim进行混合仿真。具体教程参见vcs官方guide(vcs.pdf)
至于使用Virtuoso用数字verilog作为顶层文件(并含IP),没有找到很好的方法
暂定使用VCS+XA流程。
项目分两步走:
- 两个Die之间的PHY直连,搭建含DMA/SRAM/NIC/SPI的SOC系统,通过SPI控制Die-to-Die SOC系统运转(十一之前完成)
- 加入PHY,用VCS+XA流程跑通整个工程
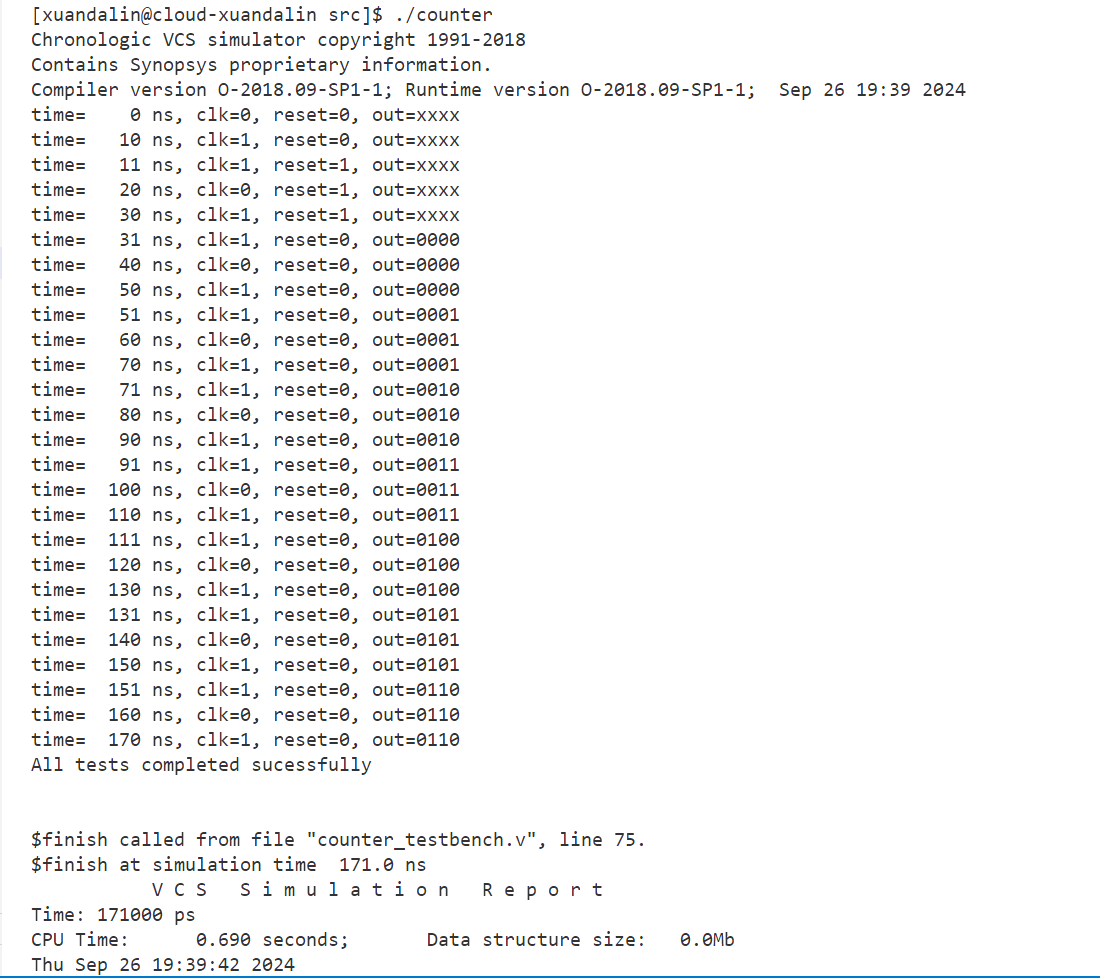
新建文件夹并进入:mkdir src; cd $_
使用vcs运行vcs -o counter -f counter_filelist.txt时,报错fatal error: gnu/stubs-32.h: No such file or directory
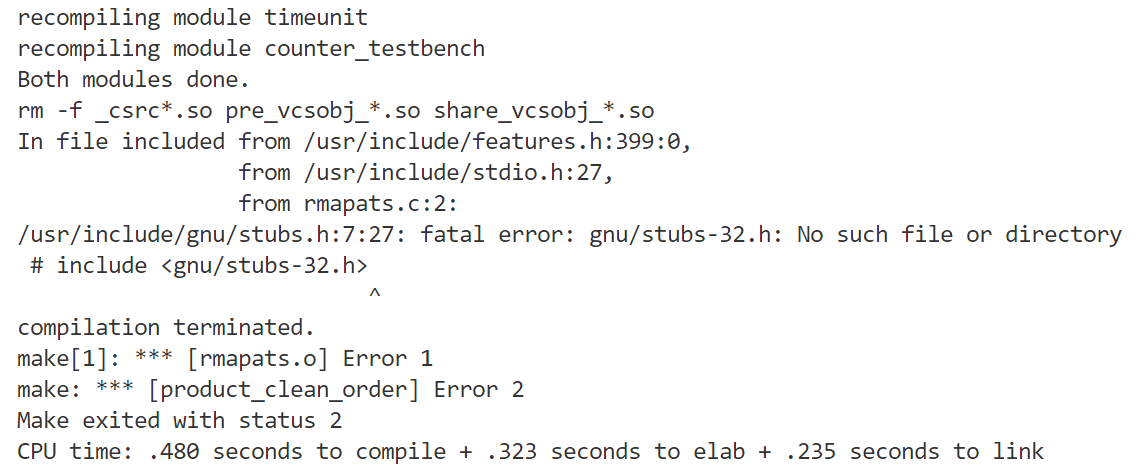
可能是缺少依赖库。安装i686库:sudo yum -y install glibc-devel.i686 glibc-devel。可以work!
尝试module load verdi/2018.09,提示找不到LD_LIBRARY_PATH

尝试1:在~/.bashrc中加上export LD_LIBRARY_PATH=/usr/local/lib。可以work!
最终,直接不需要所有的LICENSE和环境变量的设置,ilaunch vcs,解决所有问题。原因是用户登录节点没有存放license, license在远程计算节点,所以ilaunch可以解决license问题
关于如何在不上板的情况下驱动SPI总线的问题,考虑使用一个UVM VIP来驱动。相关资料:
https://www.synopsys.com/blogs/chip-design/mastering-uvm-axi-vip-usage.html
SPI总线介绍
https://www.analog.com/en/resources/analog-dialogue/articles/introduction-to-spi-interface.html
SPI2AXI Bridge可参考
https://github.com/airhdl/spi-to-axi-bridge
Verdi仿真技巧
调出信号波形:单击uut后ctrl+4
调出选信号窗口:空格键+g
配置NIC400
按照socrates使用教程配置NIC,path Matrix配置存疑:为什么m_axi_sram要去连s_axi_d2d,难道不应该是m_axi_sram通过dma去连d2d嘛?另外,为什么m_apb_dma不用去连s_axi_d2d,这样子难道dma的数据进得去d2d吗?
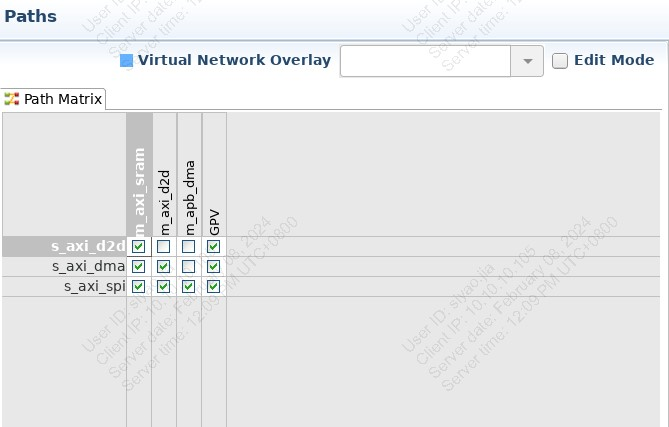
查看d2dphy里面的nic400.xml文件,可见贾学长的截图与实际生成的d2dphy中的IP不一样。实际生成的path matrix如下:
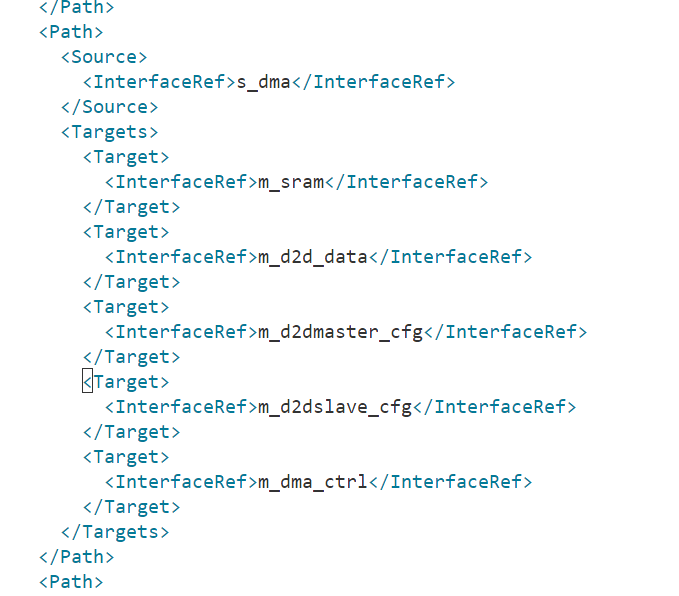
向学长确认几个事情:
1. 为什么SRAM是作为master出现的
1. 为什么sram的线可以直连d2d,而不是连到dma_slave,由dma_master连到d2d_slave
1. memory map界面如何取消对所有slave interface的绑定?
1. 为什么用APB DMA,是因为没有AXI DMA吗
按socrates使用文档操作,可以生成RTL代码
axi_interconnect中一从对多主的模式下,总线接口是怎么选择的
AXI Interconnect主从选中是通过不同地址映射关系实现的,完成这一功能的是其内部的AXI Crossbar。
GPV (Global Programmers View)
在新建coreConsultant Workspace时遇到问题:DESIGNWARE_HOME环境变量not set
(找到了,应该在/capsule/eda/synopsys/designware2020/下面的各个IP里)
DW_axi_x2h是从AXI到AHB的桥IP
DW_axi是一个AXI的crossbar
SRAM接到AXI总线上可以用axi_gs
https://www.synopsys.com/dw/dwtb.php?a=sram_to_axi
决定使用简单的verilog来实现SRAM,预计使用Alex Forencich的verilog-axi Github项目中的axi_ram.v
DMA配置
S家的DMA是AHB接口,但NIC只支持AXI和AHB-LITE接口,好在DW_ahb_dmac开放了一个参数DMAH_M1_AHB_LITE,可以通过配置这个参数来把DW_ahb_dmac的接口配置为AHB-Lite,故而可以将dma直接接在nic上面
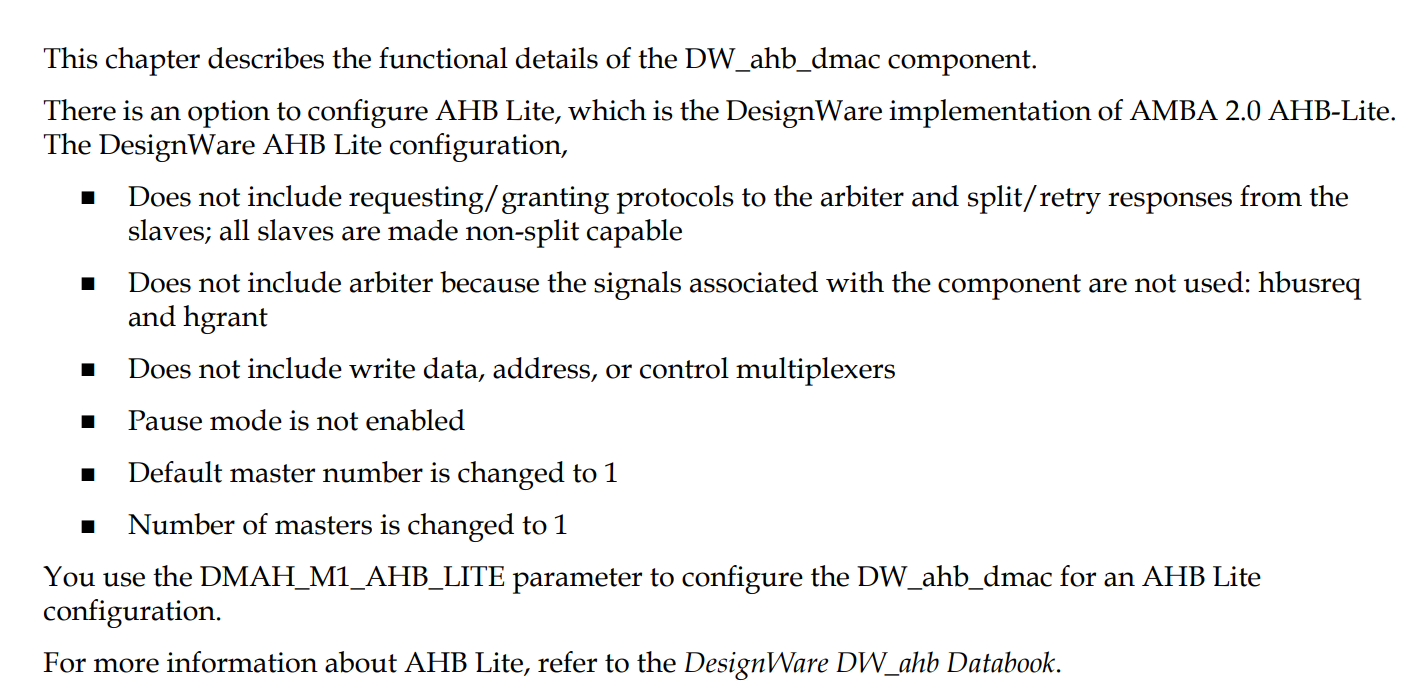 (见DesignWare DW_ahb_dmac_Databook)
(见DesignWare DW_ahb_dmac_Databook)
考虑到如果没有CPU的介入,DMA/D2D这些都有自己的分离的data/ctrl接口(AHB_DMA有一套DMA Interface,D2D的master和slave都有一套AXI_LITE接口),总线挂载太麻烦。听了zh的建议,决定不手写SPI stimulus,而是挂一个ARM核来控制。
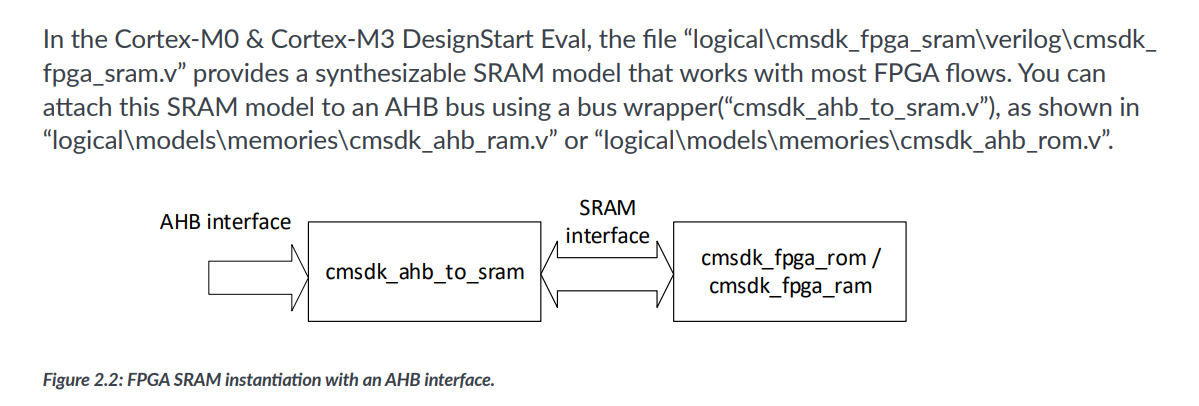
在system-on-chip-design-with-arm-cortex-m-processor.pdf的第39页也有一个AHB接口的SRAM.v文件可供参考
或者也可以尝试简单一点, 在vivado里面用VCS仿真?可以参考
https://adaptivesupport.amd.com/s/article/61846?language=en_US
这个提议很快被否决了,因为zynq核不能用于vcs仿真
https://adaptivesupport.amd.com/s/question/0D54U00007a12LvSAI/can-vcs-be-used-to-simulate-zynq-block-design?language=en_US
所以还是老老实实用arm吧
或者rocket chip?
RapidSilicon IP ahb2axi_bridge axi2axilite_bridge生成
由于DW_axi_x2h是由AXI master向AHB slave转换的IP,而本系统需要的是从AHB_Lite master 向AXI slave转换的IP,故此弃用Synopsys的DW_axi_x2h,改用RapidSilicon 的ahb2axi_bridge。Github地址如下: https://github.com/os-fpga/IP_Catalog/tree/main/rapidsilicon/ip/ahb2axi_bridge/v1_0
这是一个通过配置参数生成IP的IP生成器。对于ahb2axi_bridge这个IP,可以配置的参数有data_width, addr_width, id_width。在运行生成脚本ahb2axi_bridge_gen.py过程中会提示缺少migen,litex这些库,需要注意的是,litex需要下载2023.8版本,不可以下载默认的2023.12版本,因为2023.12版本删除了build/osfpga,但是ahb2axi_bridge_gen.py需要这个子库。配置完之后运行脚本仍会报错,提示

只需要将ahb2axi_bridge_gen.py中的ClockDomain()改为ClockDomain(“sys”)即可成功运行。
Conda虚拟环境相关命令
切换到虚拟环境目录下的bin,直接source activate,即可进入base环境。比如source /lamport/makkapakka/xuandalin/miniforge3/bin/activate
启动虚拟环境conda activate 虚拟环境名
查看虚拟环境conda env list
跑Muyan VCS提示cross-module reference resolution error
命令make run_vcs TC=tc_soc_spi_debug_test DEFINE=BUMP_SPI_DEBUG1

查看tb_2muyan.v
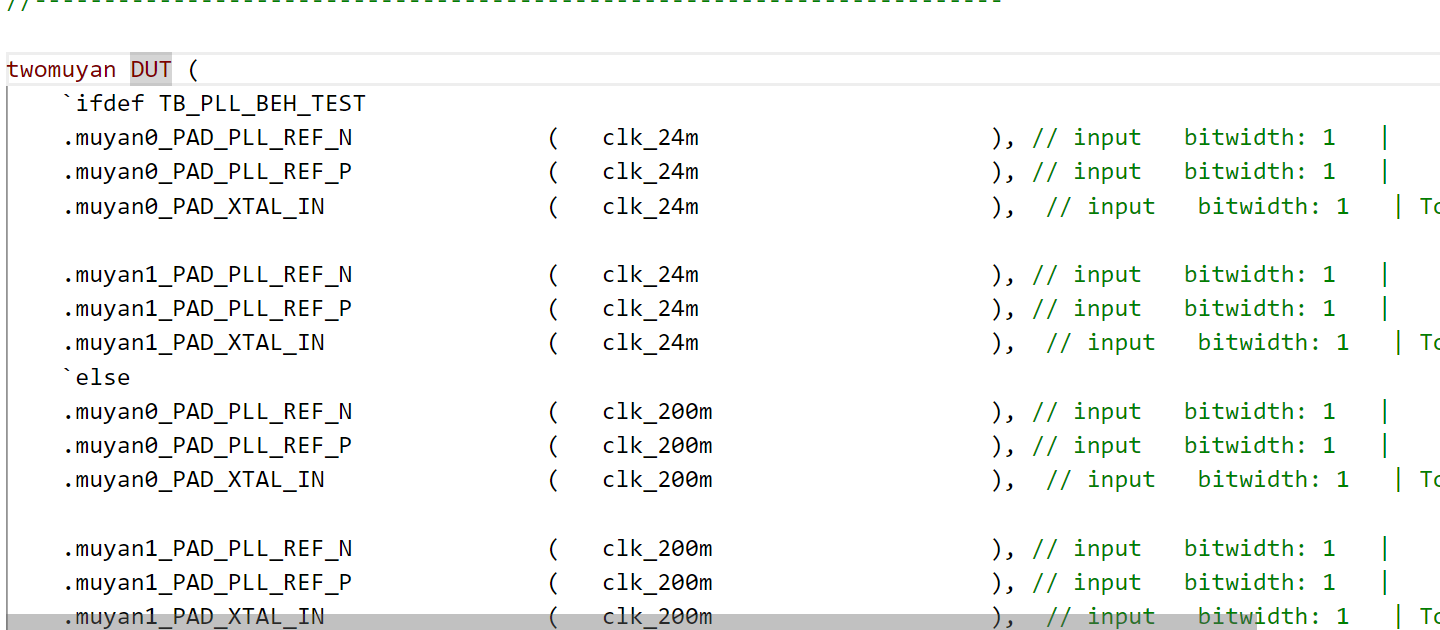
似无问题
原因是hierarchy出了问题,默认的top是tb_2muyan,里面例化了两个muyan,muyan里面才是u_dig_top。
muyan0 (d2dm_tx) –> muyan1 (d2ds_rx):
每个muyan中都有1个Md2dMaster和1个Sd2dSlave
总结:通过GPIO输出
m_io_tx_flit @ Md2dMaster (muyan0)
–> io_tx_flit_d2dm @ subsys_hsbus_top (muyan0)
–> d2d_m_tx_flit @ d2d_bump_ctrl (muyan0)
–> d2dm_pad_out @ d2d_bump_ctrl (muyan0)
–> d2dm_pad_out @ dig_top (muyan0)
(via PDUW08DGZ_H_G, d2dm_pad_out@I, PAD_D2DM_TX@PAD)
–> PAD_D2DM_TX @ muyanD2D (muyan0)
–> d2d_s_rx @ muyanD2D (muyan1)
–> bump_bank0_int_i @ dig_top (muyan1)
–> bump_bank0_int_i @ d2d_bump_ctrl (muyan1)
–> d2d_s_rx @ d2d_bump_ctrl (muyan1)
–> io_rx_flit_valid_d2ds @ subsys_hsbus_top (muyan1)
–> s_io_rx_flit_valid @ Sd2dSlave (muyan1)
muyan1 (d2dm_tx) –> muyan0 (d2ds_rx)
s_io_tx_flit_valid @ Sd2dSlave (muyan1)
–> io_tx_flit_d2ds @ subsys_hsbus_top (muyan1)
–> d2d_s_tx_flit @ d2d_bump_ctrl (muyan1)
–> bump_bank0_int_o @ d2d_bump_ctrl (muyan1)
–> bump_bank0_int_o @ dig_top (muyan1)
–> bump_bank0_int_o @ muyanForD2D (muyan1)
–>d2d_s_tx_flit @ muyanForD2D (muyan1)
–> PAD_D2DM_RX @ muyanForD2D (muyan0)
(via PDUW08DGZ_H_G: PAD_D2DM_RX@PAD, d2dm_pad_in@C)
–> d2dm_pad_in @ muyanForD2D (muyan0)
–> d2dm_pad_in @ dig_top (muyan0)
–> d2dm_pad_in @ d2d_bump_ctrl (muyan0)
–> d2d_m_rx @ d2d_bump_ctrl (muyan0) if wire_bonding_package==true
–> io_rx_flit_valid_d2dm @ subsys_hsbus_top (muyan0)
–> m_io_rx_flit_valid @ Md2dMaster (muyan0)
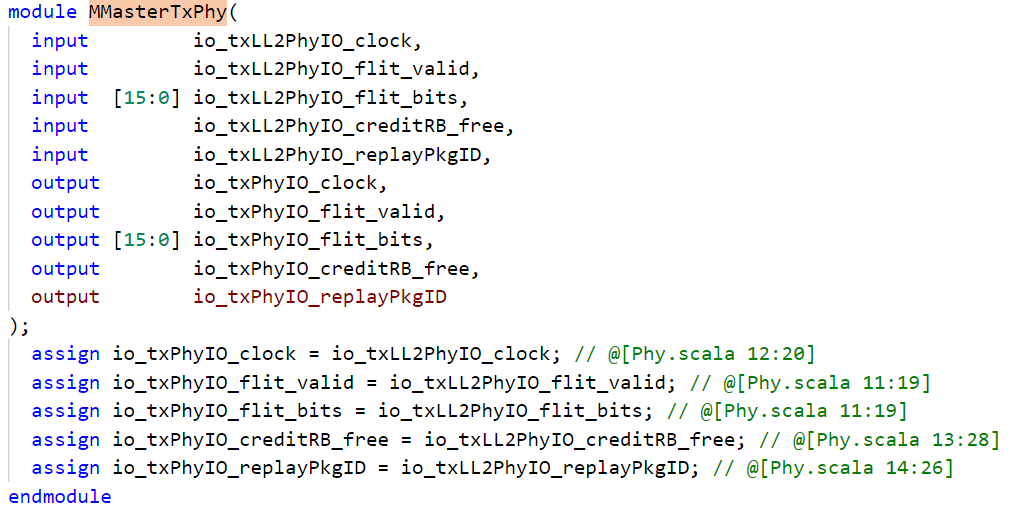
muyan原版代码中是没有PHY的!如下图为d2dMaster.v中的MMasterTxPhy module
PDUW08DGZ_H_G模块理解
感觉像实现了GPIO接口(同样带OEN,可配置为输入/输出)
代码
module PDUW08DGZ_H_G (I, OEN, REN, PAD, C);
input I, OEN, REN;
inout PAD;
output C;
wire MG, pull_pad, pull_c;
parameter PullTime = 10000;
bufif0 (PAD_q, I, OEN);
pmos (MG, PAD_q, 1'b0);
bufif1 (weak1, weak0) (PAD_i, 1'b1, pull_pad);
pmos (MG, PAD_i, 1'b0);
pmos (PAD, MG, 1'b0);
bufif1 (C_buf, PAD, 1'b1);
bufif1 (weak0,weak1) (C_buf, 1'b1, pull_c);
buf (C, C_buf);
not (RE, REN);
buf #(PullTime,0) (pull_pad, RE);
buf (pull_c, RE);
`ifdef TETRAMAX
`else
always @(PAD) begin
if (PAD === 1'bx && !$test$plusargs("bus_conflict_off") && $countdrivers(PAD))
$display("%t ++BUS CONFLICT++ : %m", $realtime);
end
specify
(I => PAD)=(0, 0);
(OEN => PAD)=(0, 0, 0, 0, 0, 0);
(PAD => C)=(0, 0);
endspecify
`endif
endmodule
信号解释
- Inputs:
I: The input signal that will be driven onto the output (PAD) based on the control signals.OEN: Output Enable. When low (0), it allows the inputIto drive thePAD. When high (1), it disables this driving.REN: Read Enable. This is used to control pull-up/pull-down behavior.
- Inout:
PAD: This is a bi-directional signal that can act as both an input and output depending on the control signals.
- Output:
C: The output that reflects the state of thePADsignal after processing.
功能描述
-
OEN 拉高时,I经过一级bufif0和两级pmos传递到输出PAD
-
REN拉高时,与输出相关的节点(PAD_i–>关联PAD;C_buf–>关联C)被weak pullup,保证读到的不会是不确定的值。此时PAD的状态被反映在C
-
PAD也可以作为输入,经过1级bufif1和1级buf,输出反映在C
其他
-
PullTime的作用:The pull-up (or pull-down) action may take some time to assert fully, especially in high-speed designs. The delay helps ensure that the signal stabilizes before being sampled by other circuits.
-
语法:
-
The syntax
buf #(delay, transition_time) (output, input);specifies a buffer with defined timing characteristics.delay: The time it takes for the output to reflect a change in the input.transition_time: The time it takes for the output to change from one logic level to another.
-
-
-
为什么仅在RE的时候给weak pull up:
- Weak pull-ups consume power, albeit less than strong pull-ups. If the pull-ups were always active, it could lead to unnecessary power consumption, especially in low-power designs.
- In a tri-state environment, allowing signals to float can be necessary for proper operation. If pull-ups were always enabled, they could interfere with other active drivers on the bus or line, potentially leading to conflicts.
-
bufif1, buf这些在控制信号有效时传的都是strong pull up 和strong pull down
问学长:
1. PHY的文件是最新的吗?
1. 为什么PHY里面的DATA_IN, DATA_OUT都是128的位宽呀,d2d代码里tx_flit_bits是16位宽,rx_flit_bits是8的位宽 (是不是3D的那种配置)(答:都是可配置的)
1. 
1. 为什么要有PHY(带宽匹配)
1. 如何处理除了128位之外的信号,比如Package ID和Creditfree,是同步发送吗?
cfmom_2t
INVD18BWP30P140UHVT
BUFFD4BWP30P140UHVT
BUFTD12BWP30P140ULVT
rnwsti_m
rupolym_m
TIEHBWP30P140UHVT
D2D测试
可以通过如下激励实现片间传输。
例:
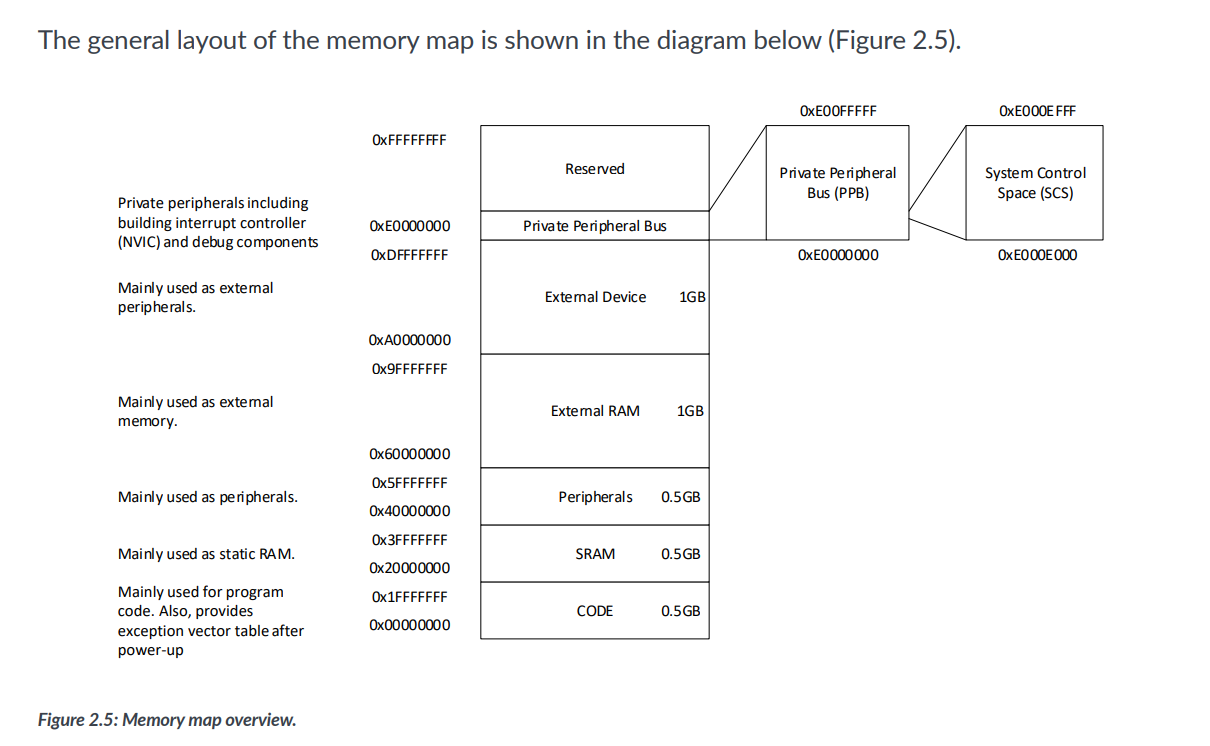
预先向挂在AXI High-Speed Bus上的D2D master cfg端口0xC1000000写入pre_addr_in,比如写0x00000B00,表示需要访问的另一块muyan的地址是B00xxxxx,之后通过访问0xA00xxxxx(D2D master挂在AXI High-Speed Bus上的数据端口),即可访问B00xxxxx。
- 验证muyan Master Tx –> Slave Rx (flit width = 16) & Slave Tx –> Master Rx (flit_width = 8)的正确性
- 方法:D2D是从一块muyan的memory搬到另一块muyan的memory,所以只要搬完之后对比两块memory中的数据是否一致就可以获悉是否正确
- 具体方法:
- 用reg_writex系列函数从muyan0写数据到muyan1,再用reg_read函数从muyan1读出,对比是否与写进的数据一直
- 用DMA从muyan0写数据到muyan1,再用DMA将写到muyan1的数据读回muyan0的不同位置,对比muyan0的两个位置数据是否一致
- 问题:
- muyan0读写B0090000地址(muyan1的NPU data),hs_bus总线上卡住不动
- 另需注意:如采用reg_write32函数写0x03,总线上传输的数据实际为0x03030303。由此知,需要写全输入数据
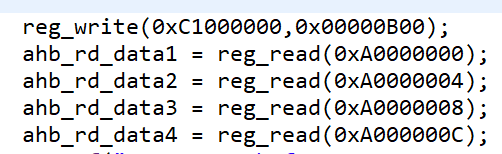
- 改成读写B0000000/004/008/00c地址,hs_bus总线读不出前三个写的信号,如图
 写了1,2,3,4,但是只返回了一个非零的rdata=4。激励程序如图:
写了1,2,3,4,但是只返回了一个非零的rdata=4。激励程序如图: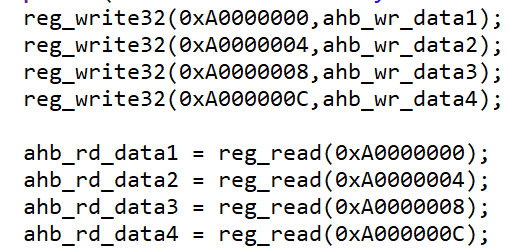
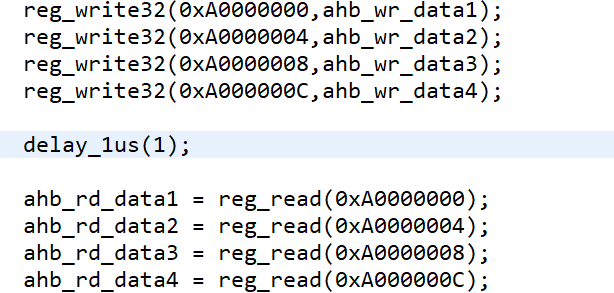
- 考虑在写之后添加1us的delay,对应函数为delay_1us(time)。测试程序如图。
 结果仍然错误,体现为从第二个写入数据开始,连续返回三个resp error,如图
结果仍然错误,体现为从第二个写入数据开始,连续返回三个resp error,如图
- 考虑是因为在每次读写变换之前没有每次都写入preaddr_in,添加之后再次仿真。没用
- 考虑是因为CPU实际不允许读写Muyan1 NPU数据区域,考虑读写Muyan 1 NPU ctrl区域(preaddr_in=0x00000C00)。可以成功读出2,3,4,数据1(C00位置读出来是0)查看NPU ctrl寄存器分配,
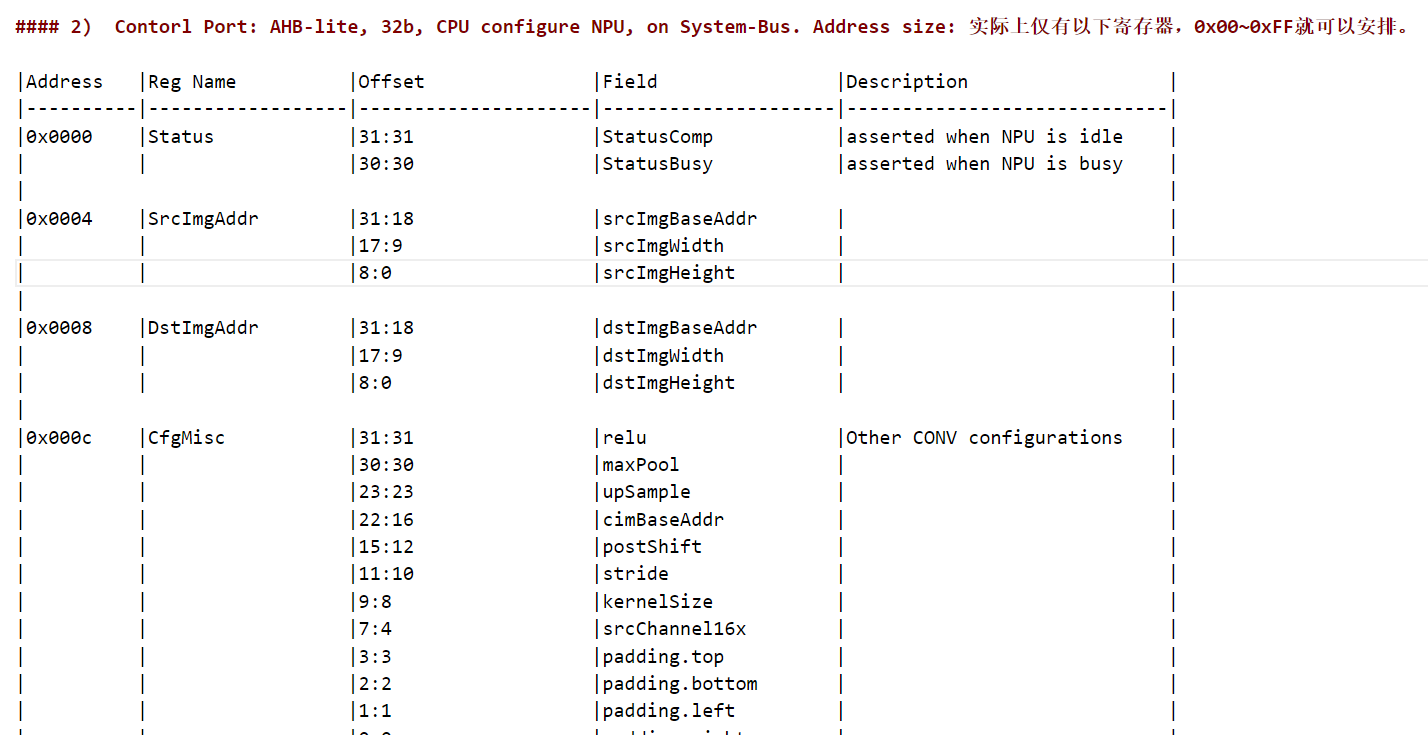 可知位置0为只读的状态寄存器。跳过该寄存器,读写寄存器正确。本部分完成。
可知位置0为只读的状态寄存器。跳过该寄存器,读写寄存器正确。本部分完成。
- 验证muyan Master Tx –> Slave Rx (flit width = 64) & Slave Tx –> Master Rx (flit_width = 64) 不经过GPIO口的正确性
- 方法:不经过GPIO,直连
- 研究清楚D2D Link中,CreditFree和PkgID与flit及其valid期间需不需要满足什么时序关系?即,可否GPIO传输CreditFree和PkgID,PHY传输flit及其valid
D2D PHY传输中的Credit_free和Pkg_ID信号
Credit_free:单比特信号。由Receiver检测到1个信息量被consumed时发出,指示Sender的credit_counter+1,即可传输信息量+1。
- D2D slave Tx–> D2D master Rx DataLinkLayer –> D2D master Tx DataLinkLayer
- 开始传输:1bit high
- 后续3个周期:依次传输AR, AW, W通道的Credit_free。接收端通过移位寄存器接受满3个后,拉高valid,从而更新credit_counter(使credit_counter+1)
- D2D master Tx –> D2D slave Rx DataLinkLayer –> D2D slave Tx DataLinkLayer
- 开始传输:1 bit high
- 后续3个周期:依次传输B,R通道的Credit_free。接收端通过移位寄存器接受满2个后,拉高valid,从而更新credit_counter(使credit_counter+1)
Pkg_ID: 单比特信号。Receiver检测传输成功与否,如传输成功,返回成功传输的当前Pkg ID;如传输失败,返回成功传输的最近一个Pkg ID。Sender收到Pkg_ID后,与存储的上一个成功传输的Pkg_ID_last相比,若Pkg_ID == Pkg_ID_last + 1,表明传输成功,Sender无动作;若Pkg_ID == Pkg_ID_last,表明传输失败,Sender触发Replay机制重发。
- D2D slave Tx–> D2D master Rx DataLinkLayer –> D2D master Tx DataLinkLayer
- 开始传输:1 bit high
- 后续packageIDWidth个周期:从低位到高位依次传输
本周任务:
Tx 16根线,Rx 16根线,PHY 8G,总线256根线
UCIE的sideband怎么传
改d2d controller
模仿UCIE的方式加上sideband(包括credit和pkgid)
D2D-Link代码中AsyncQueue和AsyncFIFO的区别
AsyncFIFO是被动的,要外界给出rd.pop信号才能输出
AsyncQueue是主动的,相当于把AsyncFIFO包了一层激励逻辑,只要自己觉得合适,就自动输出,所以rd.valid是其输出而不是输入。
改变文件夹权限为只读
chmod a=r foldername/
改变后,vscode无法读取文件夹内容,terminal无法读取文件夹内容
可用chmod 777 foldername/ 退出
VNC中跑2muyan的仿真波形
ilaunch make run_vcs TC=tc_2muyan_boot
ilaunch make run_verdi TC=tc_2muyan_boot
需要注意:每次跑之前需要source setup.env(不可以./setup.env)
D2D B/R通道无限重发问题Debug记录(2024.11.27-2025.01.13)
需求描述
单笔传输:通过FPGA上spi master向muyan上spi slave发出执行一笔片间AXI传输(AXI Write)的指令,数据由spi外设经CPU到HighSpeed Bus,进而进入D2D Master。D2D Master将该笔AXI Write打包并发送给FPGA上的D2D Slave,D2D Slave解包出AXI Write并将该笔数据写入BRAM。
需求:顺序执行多次单笔传输。
问题描述
第1笔传输正确写入BRAM,但AXI Slave往AXI Master发送WRESP通道信息时,出现D2D传输层面的无限重发,导致该笔AXI传输无法完成,muyan总线挂死。后续对muyan AHB, APB, HighSpeed三条总线的所有spi访问均失败。
Debug过程
尝试1:构建Vivado仿真工程,以AXI VIP对D2D Slave发起相同数据的写请求,对比D2D Slave Tx/Rx每条信号线传输的比特是否正确
D2D Slave Tx flit_bits & flit_valid & creditARW_free & pkgID均完全与仿真工程相符。
D2D Slave Rx flit_bits & flit_valid 完全与仿真工程相符。
ILA未见Vivado仿真工程中应有的用以释放R/B通道fifo的D2D Slave Rx creditRB_free
ILA捕捉到D2D Slave Rx pkgID为全f,指示Slave重发。(Vivado仿真工程中为0x0,即Master正确接收到R/B通道信息)
由上推测,或是Muyan中D2D Master逻辑错误,或是数据未正确被Muyan中D2D Master识别到。
D2D Slave Rx pkgID & creditRB_free示意

D2D Slave Tx 无限重发示例

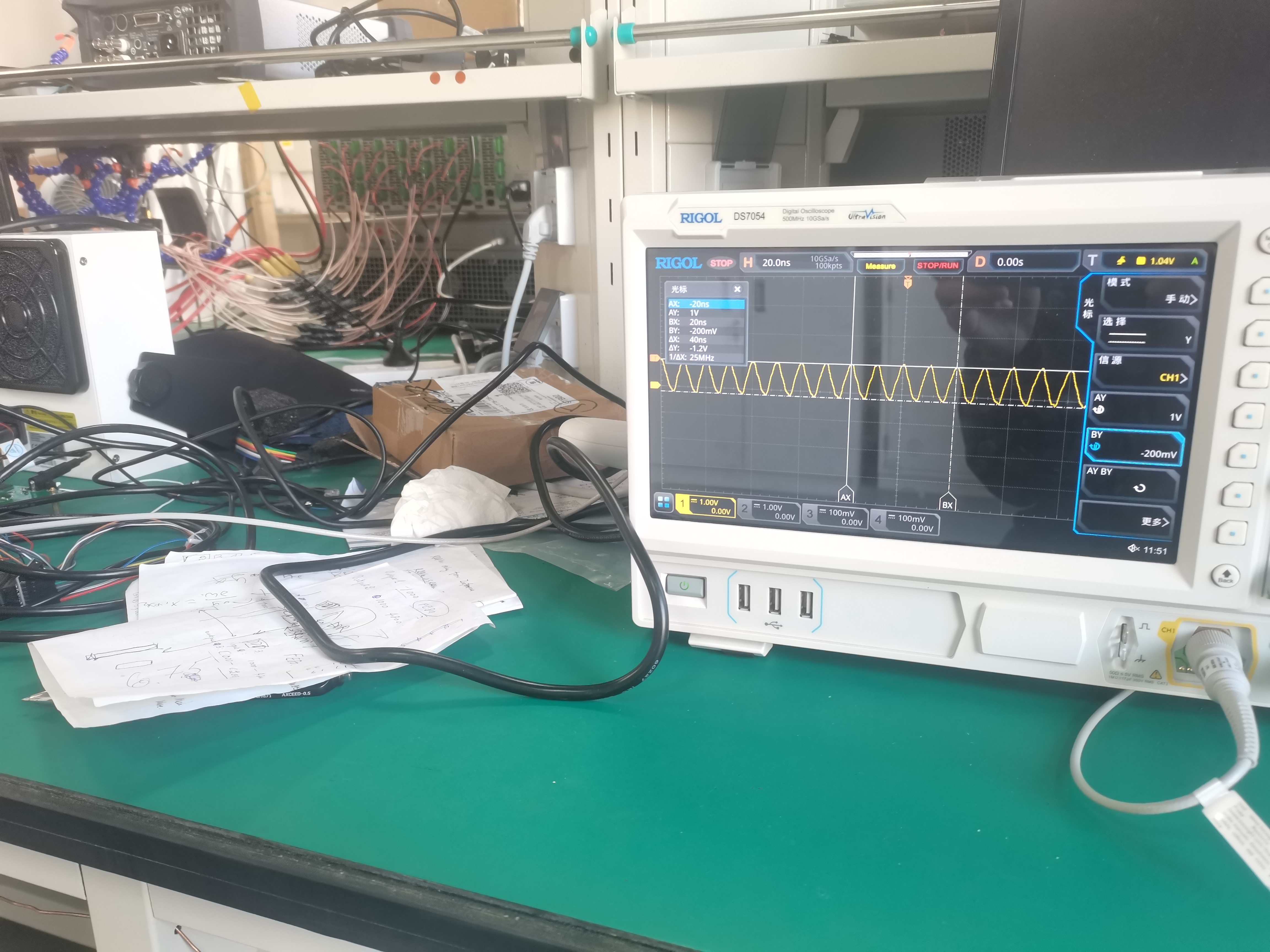
尝试2:用示波器点PCB上的tp引脚如下图,检验Slave Tx数据是否成功、正确到达tp引脚。
参Muyan_V1R2-diffclk.pdf

完全与ILA捕捉到的现象符合,说明数据成功到达该位置且依然十分干净。每个bit与预期相符。
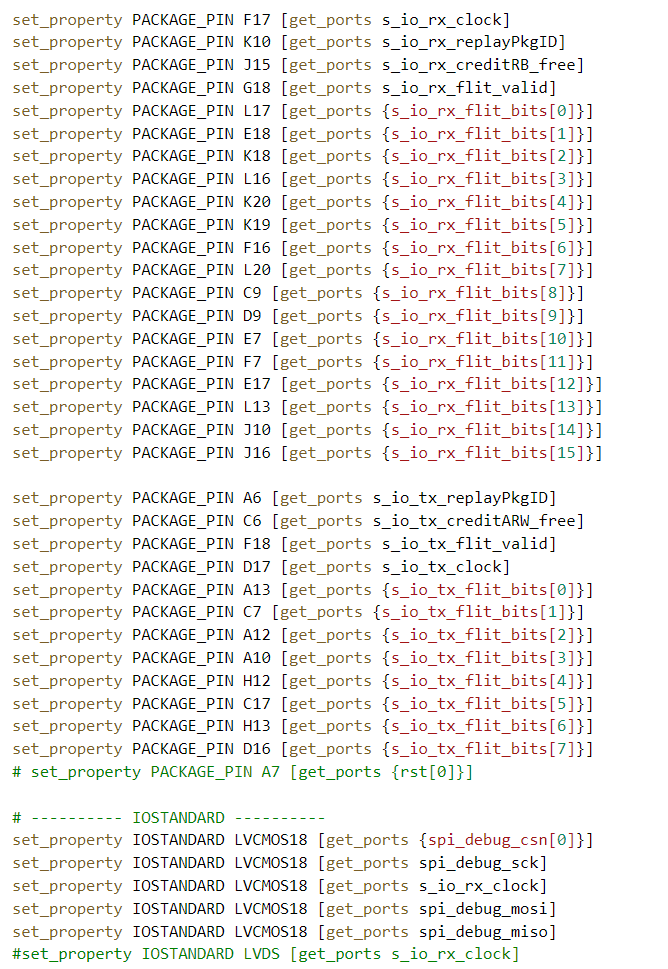
尝试3:检查XDC文件中所有约束(尤其是D2D、SPI相关的经FMC插槽上到PCB的信号约束)
与浙大项目crosscheck,XDC文件没有问题
与zcu106 user guide及PCB原理文件 对比
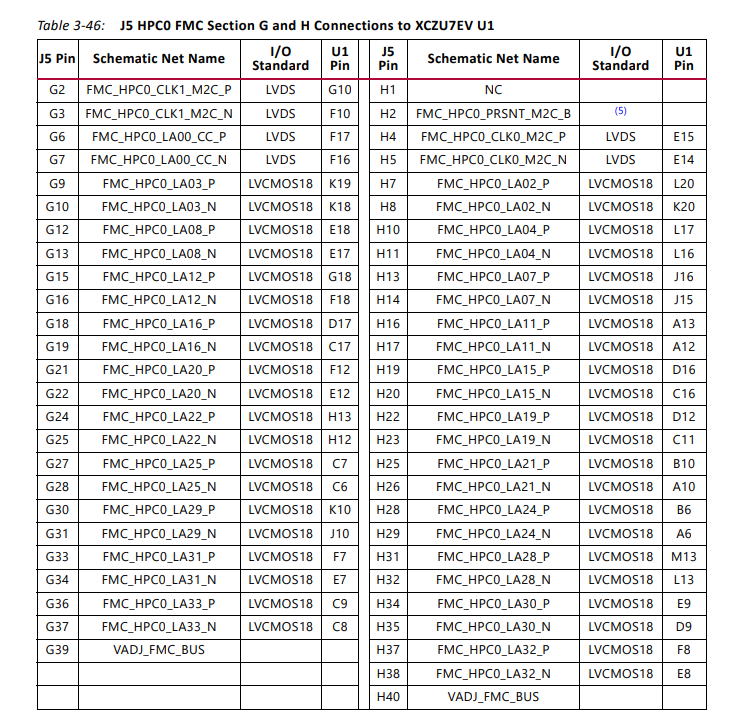
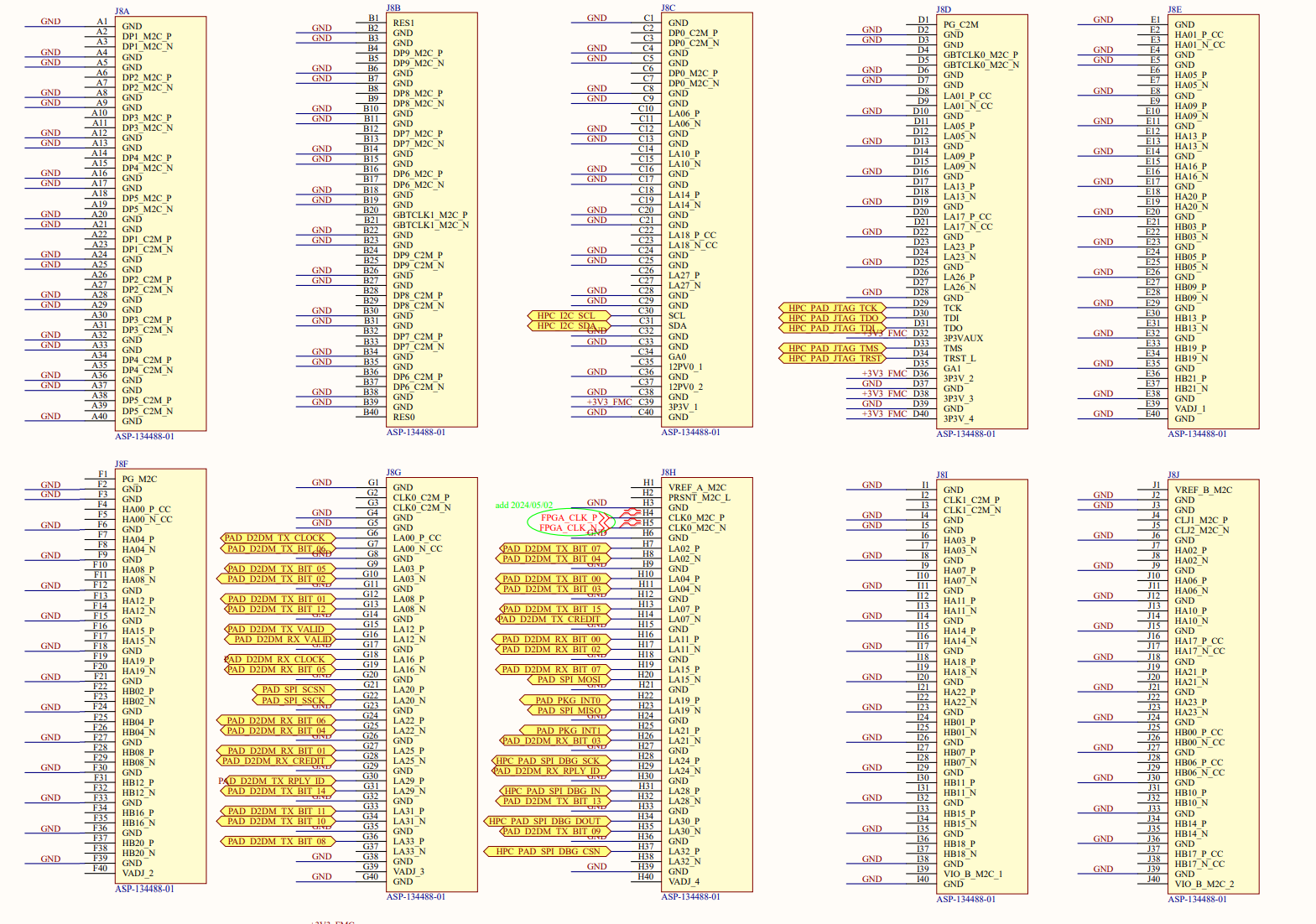
完全一致
尝试4:修改muyan d2d Rx时钟和FPGA时钟为同一时钟源,在极低特定频率(muyan时钟4M,d2dMaster Tx时钟4M,FPGA时钟4M,spi时钟频率0.7M)情形下可以稳定有2-3笔随机位置传输成功,其余失败,且大概率挂死muyan总线。
实验结果如下:(0x2333为未写入BRAM(失败传输))



尝试5:通过构建DONT_TOUCH的LUT延时链,调整muyan时钟与muyan d2dmaster rx时钟之间的相位
构建LUT延时链如下:

没有任何作用
尝试6:用万用表测量tp引脚与PCB板上芯片IO PAD引脚之间电阻,看看是否有断路出现
电阻均稳定在1Ω左右,正常且无断路。
尝试7:肉眼观测PCB设计文件Muyan_V1R2-diffclk.pdf中是否存在短路、断路或信号错接
无上述异常。
尝试8:怀疑为PCB损坏或用以固定芯片的Socket损坏或muyan芯片损坏
均进行更换,无效
尝试9:怀疑为时钟沿不匹配,抓取muyan时钟、D2D master Tx/Rx 时钟,发现肉眼看确实满足逻辑中上升沿发送、下降沿接收的setup/hold要求
蓝线:D2D Master Rx Clock (tp3);黄线:Muyan Clock (k3),muyan PCB开关:左
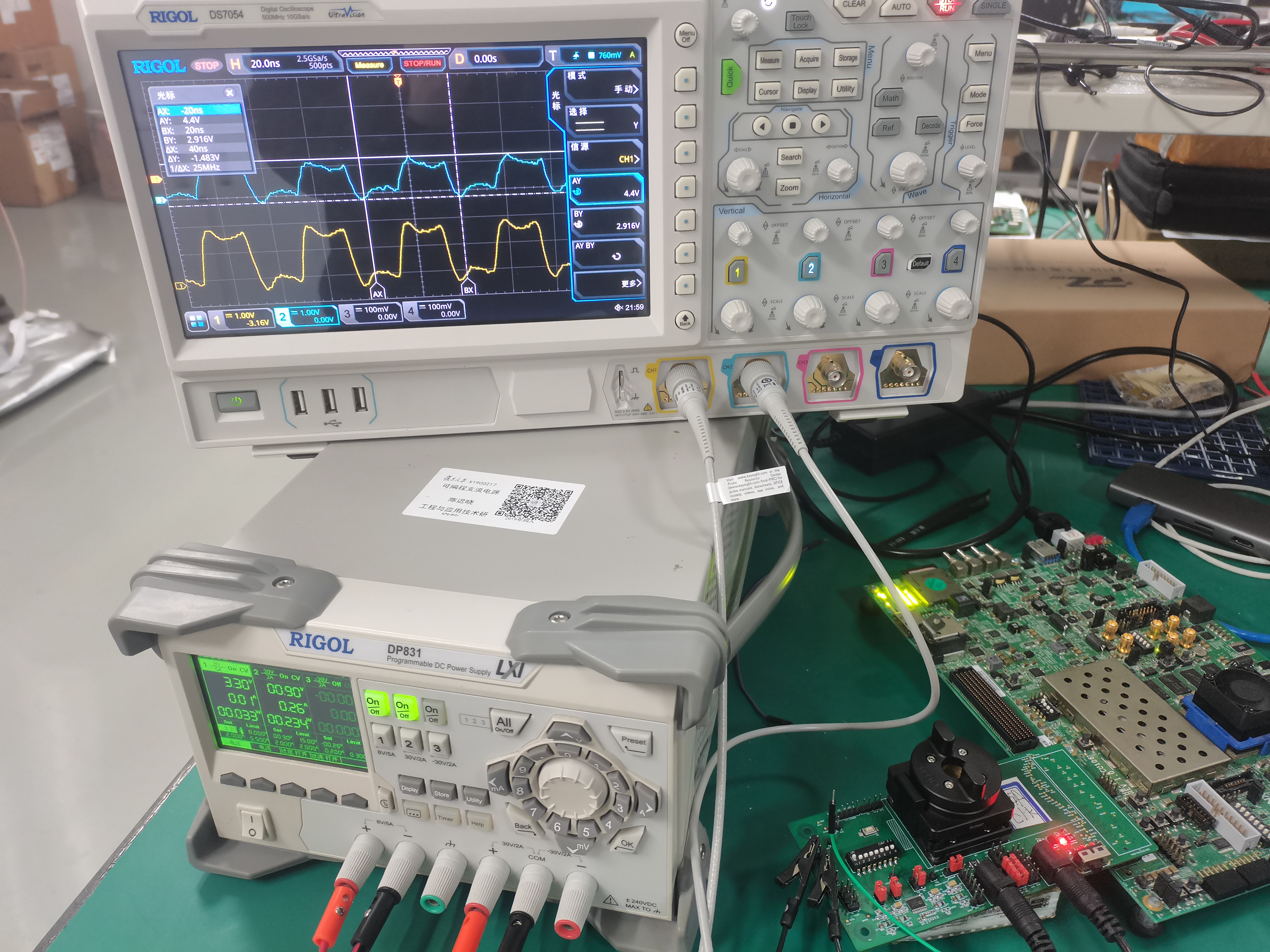
蓝线:D2D Master Tx Clock (tp15);黄线:Muyan Clock (k3);muyan PCB 开关:左
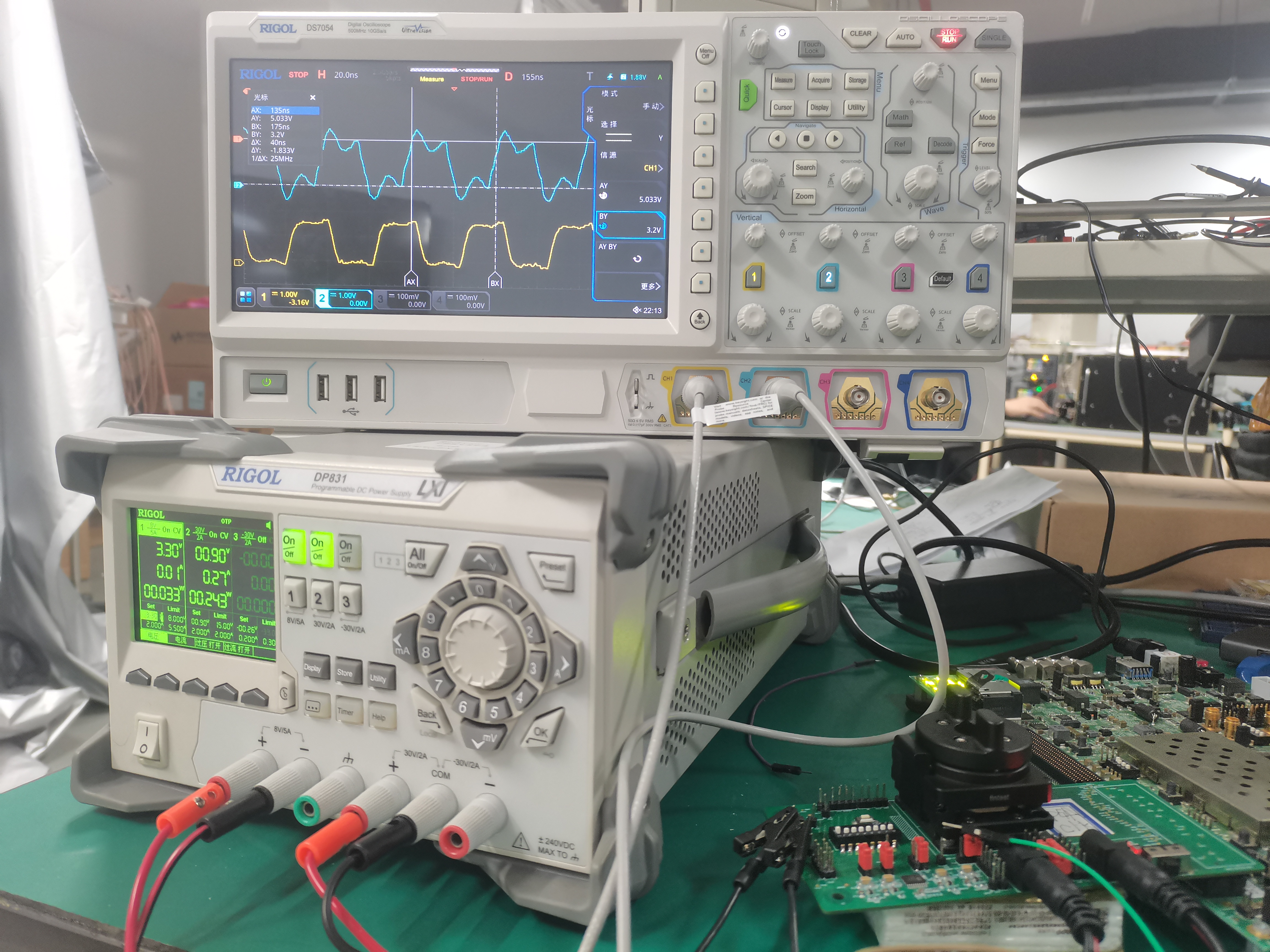
尝试10:测量D2D Master Rx 信号电压摆幅,发现普遍仅有1.2-1.3V,接近1.8V电平标准下的最低输入高电平(VIH)(按70%VDD算,约1.26V),信号可能掉进中间地带,导致muyan有一定概率出现识别错误,与之对比,D2D Master Tx信号电压摆幅均为标准1.8V。由此向焦老师反映后,发现是D2D Master Rx这部分的芯片GPIO PAD同时开启了输入使能和输出使能,造成PAD冲突。禁用这部分GPIO的output pull-down enable之后,D2D Master Rx信号电压摆幅上升到3.8V(仅测量了D2D Master Rx Clock),D2D工作终于正常,可以在75MHz下稳定work。
下图为捕捉到的D2D Master Rx Valid信号,远远达不到1.8V
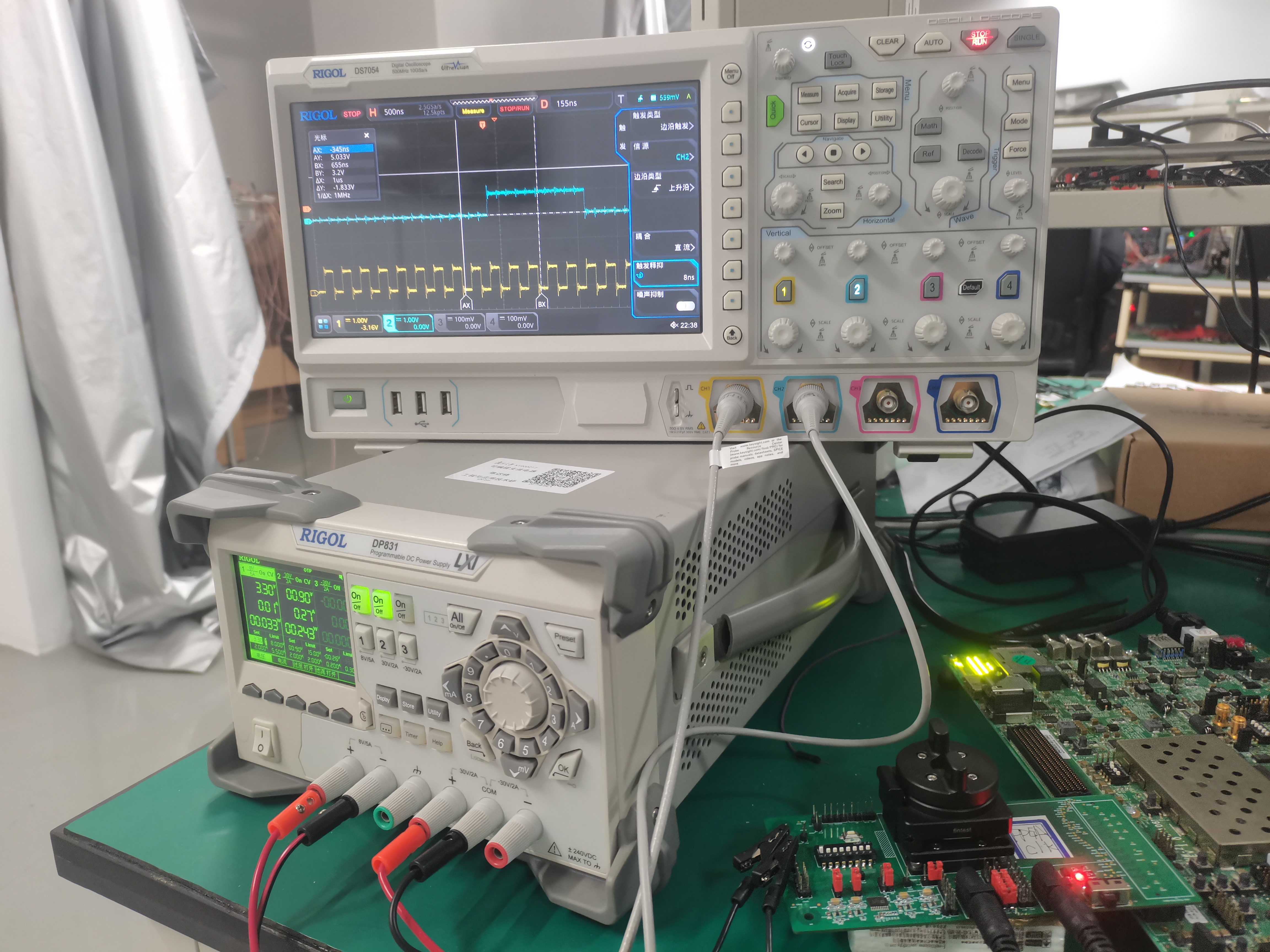
下图为浙大项目联测的同muyan不同PCB的Muyan D2D Master Rx Clock,同样徘徊在1.2V左右
下图为d2d_bump_regfile.v中的出错寄存器

将该寄存器(0x22020040)改为32’h000ff000,即将Muyan D2D Master Rx这部分的GPIO pad out enable关掉后,正常work。

如上图,事实上,这部分GPIO的输出使能已经被禁用了,真正让d2d work的是开路掉pad的下拉电阻?(看代码感觉是上拉电阻,需确认),参上文PDUW08DGZ_H_G模块理解:

最终,muyan d2d master rx时钟呈现出3.8V的电压摆幅(似不正常,因FPGA IOstandard是1.8V)

D2D输出正常

后续1:Muyan CPU提频
通过PLL控制。给PLL输入24MHz,通过调参数,使Muyan CPU PLL和Tx PLL各输出目标值。
最终实现CPU@300MHz, D2D@300MHz
IIC总线可以用来控制供电
ol.iic.send(address=0x75, data=bytes([1]), length=1)
ol.iic.send(address=0b0101011, data=bytes([0b00010000, 50]), length=2)
50代表的位置有一个滑动变阻器,调为50本身应该是muyan供电0.9V,但实际观测发现只有0.7V。将50稍微减小到45,42,39,可见muyan供电电压上升。
Arm Socrates修改现有总线
首先随便新建个目录,新建一个project
选择File-import-NIC400/TLX400 Configured Component-选择目标总线xml文件-finish